・上一文章:浅谈3D芯片堆叠技术现状
・下一文章:高性能FPGA中的高速SERDES接口
利用MAX+PLUSⅡ对由VHDL编写的主控制电路程序进行编译和仿真,由分析知,主干道和支干道的控制灯正常工作时只有4种状态,而这4种状态完全取决于按键SM(主干道来车信号)和SB(支干道来车信号),故本设计主控制电路的仿真结果共有4个,由于当SM和SB都是 低电平(为0)时,所有的指示灯都为低电平,即都不被点亮,故可分3种情况讨论仿真结果,由于篇幅所限,本文只给出主干道有车、支干道有车时的仿真结果。
当主、支干道都有车时,这种情况相对复杂,他体现了控制器的精华部分,为了把此时的仿真波形更加具体化,特分3张图来详细说明其工作过程,如图3所示。
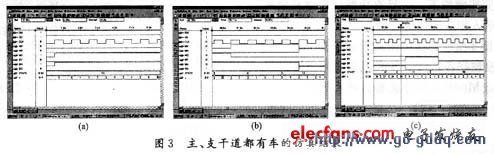
由图3(a)知,控制器刚开始工作时,主干道绿灯、支干道红灯被点亮,控制器处于状态S1(本设计输出延迟0.5 s,符合要求)。由图3(b)分析知,当主、支干道都有车时,状态S1保持到第30 s后,开始转向状态S2,即主干道由黄灯转为绿灯亮并保持4 s,支干道红 灯持续亮并也保持4 s,4 s后,控制器开始向状态S3转变,主干道由黄灯亮转为红灯亮,支干道由 红灯亮转化为绿灯亮。由图3(a)和(b)知当主支干道都有车时前半阶段支干道的红灯被点 亮的时间等于主干道黄灯和绿灯的时间被点亮的时间(34 s),符合前述的设计情况。
状态S3一直保持了30 s,即在第64 s时发生了变化,开始向状态S4转变,支干道由绿灯亮转 化为黄灯亮,主干道继续保持红灯亮4 s,4 s过后,也就是在第68 s时,控制器又由状态S4 转变为状态S1,主干道由红灯亮转化为绿灯亮,支干道由黄灯亮转变为红灯亮,完成了一个 周期的控制工作,由图3(c)知在一个周期的下半段主干道红灯亮的时间等于支干道黄灯和绿 灯被点亮的时间之和(34 s),经分析知此程序完全实现了前述的控制要求。
4 结语
EDA技术彻底改变了数字系统的设计方法和实现手段,借助于硬件描述语言的国际标准VHDL 和强大的EDA工具,可减少设计风险并缩短周期,随着VHDL语言使用范围的日益扩大,必将 给硬件设计领域带来巨大的改革。





