・上一文章:基于Linux操作系统的射频识别安检设计方案
・下一文章:电磁流量计在石油化工中应用
3实验
用简化的海底管道检测装置(漏磁检测部件中仅安装一排7个漏磁传感器和一个温度传感器),在实验室条件下,取10个温度点(-10~80℃,每10℃一个点),分别对一个半剖管道进行检测。该管道和实际海底管道具有相同材质和管径(195 mm),并按美国无损检测标准要求,用电火花加工的方法,在其内表面加工了多处不同尺寸、形状和类型的缺陷。在每个温度点处,每个漏磁传感器取55个数据,组成55组数据,取44组作为训练样本数据,11组作为测试数据,用上述神经网络方法进行训练和测试,实现温度误差的融合补偿。由于是多维输入,训练速度较慢。在网络误差设为0.001的情况下,用高斯函数训练,一般需要经过2 300步左右网络才可以满足要求。用遗传算法训练,只需要1 700步。
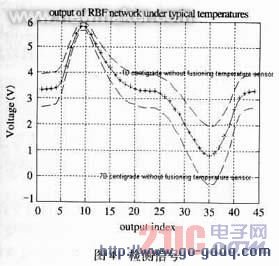
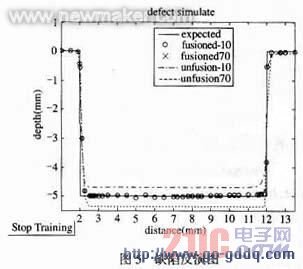
对一个长10 mm,深5 mm的标准矩形缺陷进行检测,在两个典型温度点下的网络输出见图4。图中实线是期望的输出,两条虚线分别是70℃和-10℃下,未融合的输出,“ ○”线和“+”线是这两个温度点下融合后的输出。由图可见,融合前的两条输出波形偏离目标曲线,而且表示缺陷特征的波峰波谷的水平和竖直间距与目标值有一定的差距。融合后的输出与期望值几乎重合,补偿效果显著。图5是反演后的缺陷图。线型的意义与图4相同。-10℃和70℃下的数据融合后反演出的缺陷与实际缺陷基本重合。未融合数据反演出的缺陷与实际缺陷深度有偏差。
定义传感器的温度敏感系数αS为在工作温度范围内,温度变化1 K所引起的输出电压最大相对变化的平均值。
![]()
其中,S∈(1,2,…,44)为测量点序号,随着装置在管道内爬行,代表不同的检测位置。t1、t2是工作温度的上、下限值,U(t1)、U(t2)是S处温度分别为t1、t2时传感器的输出值。用测试数据对网络进行校验,检验网络的灵敏度和适应能力。融合前后7个传感器的平均温度敏感系数分别为3.1×10-3K-1和2.3×10-5K-1。可见,多传感器融合进行温度补偿后传感器的温度敏感系数降低了两个数量级。
4结论
该文将数据融合理论和神经网络方法应用到漏磁传感器误差补偿中,大大提高了漏磁检测传感器的稳定性和准确性。对多个漏磁传感器和温度传感器检测数据融合后,输出值的温度敏感系数降低了两个数量级,为整个检测系统在高温环境下测得高准确度的结果提供了保障。当 输入节点多时,用遗传算法比用高斯函数训练网络速度快。





