・上一文章:netfilter技术分析
・下一文章:TMS320C32芯片的工作站系统原理及结构
1.1 备选整周模糊度解集的确定
利用GPS双差载波相位测量时,其数学模型为:

P0/0、X0/0初值的选取取决于对基线向量和初始模糊度范围的了解,基线分量及其变化速度分量初值可取为零,方差初值根据载体的动态情况选择,整周模糊度分量初值可取为伪距双差观测值,方差初值根据伪距的测量精度选择。
如果系统动态模型建立得比较准确(如静态时或载体运动规律已知时),则当卡尔曼滤波器稳定后,整周模糊度估计值一般具有较高的精度,可以直接取与其最接近的整数作为整周模糊度,但一般需要较长的时间才能得到正确的模糊度,对于实时性要求较高的场合不适用。实际应用时一般是当Kalman滤波达到一定
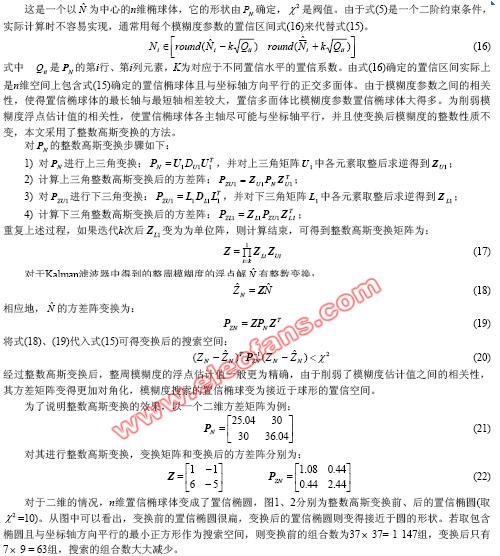

图1 整数高斯变换前的置信椭圆 图2 整数高斯变换后的置信椭圆
为进一步减少备选整周模糊度组合,将所有的使用卫星分为两组:选4颗卫星作为主组,用来确定模糊度的搜索空间,其余卫星作为从组,用于模糊度的检验。
对选为主组的4颗卫星,取其双差模糊度的浮点估计值及其方差阵进行高斯变换,得变换后的模糊度估 ,将对主组双差模糊度按式(16)确定的置信空间中的所有组合作为备选整周模糊度解集。
,将对主组双差模糊度按式(16)确定的置信空间中的所有组合作为备选整周模糊度解集。





