・上一文章:金灶A10L感应式式功能茶道电磁炉电路图
・下一文章:厦华N3430D彩电 场抖
随着汽车数量的迅猛增长,汽车检测设备的数量和质量都在不断的提高。作为车辆检测的一项重要内容,车轮定位参数检测对整车安全性能的影响举足轻重。如果车轮定位参数不正常,将导致轮胎的异常磨损、行驶跑偏、车轮摆振、转向沉重、油耗增加等问题,直接影响汽车的行驶安全。
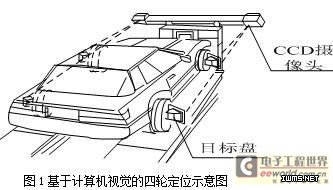
传统的四轮定位仪主要有激光式、红外线式、水准式、光学式和拉线式。而目前国内外汽车检测行业中,最新型四轮定位产品是基于计算机视觉的图像式四轮定位仪。这种定位仪完全基于计算机图像处理技术,只需两个高性能CCD传感器摄像头搭配4个安装在车轮上的目标盘(如图1所示),不需传统的电子传感器,消除了电路可能造成的故障。与传统四轮定位仪相比,大大减少了传感器数量,不必进行反复标定,只需一次标定即可重复使用,操作简单,检测速度快、精度高。
该产品技术先进,目前主要依赖进口,价格昂贵,对其原理国外厂商严格保密,国内尚未见详细报道。因而,对其原理分国外基于透视学的方式和本文基于空间向量的方式进行了详细分析和探讨。并给出了基于空间向量方式的数学模型,通过实车实验验证其有效性。
1、基于透视学的方式
国外V3D定位仪就是使用的这种原理(如美国JohnBean定位仪)。该方法检测时,摄像机拍摄车轮运动(目标盘),经图像处理后将其与已知数据进行比较,根据透视学和解析几何原理,由其目标盘反光斑的位置及大小变化精确计算出目标到摄像机距离和转动角度等几何参数,再通过数据处理后,与基准面对比计算各车轮的定位数据。
1.1 透视学基本原理
这种方法需要应用到透视学中的透视原理和透视缩短原理[3]。透视学是视觉通过假想的透明平面来观察对象,并借此研究在一定视觉空间范围内,物体图形产生原理、变化规律等。
以圆为例,如图2(a)所示,根据透视原理,当圆由远处靠近时,所产生的效果是圆的视觉尺寸会变得越来越大,即相同物体所成图像有近大远小的特点。应用此原理可以测量出到物体的距离;
如图2(b)所示,根据透视缩短原理,当圆沿横轴方向旋转时,其垂直方向尺寸将变得越来越短,逐渐变成一条线段(长度为圆的直径),当继续旋转时,又会由线段逐渐展开成椭圆,最终变回圆形;而旋转过程中,视觉效果里圆的转轴长度(直径)是不变的。因此,由圆高度在外观上的变化,可计算出圆沿横轴方向所转过的角度。同理,也可计算出圆沿纵轴方向所转过的角度。由圆的横轴与纵轴旋转效果的合成,可以计算出圆在空间中任意方向上所转过的角度和其旋转轴的空间位置情况。
1.2 目标距离与转角求取
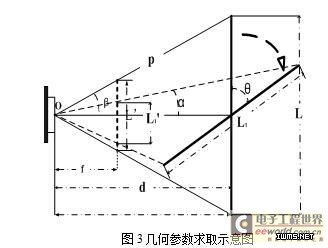
由于求取定位参数的需要,先要确定摄像机至被观察目标的距离和转角等几何参数,这些可以根据三角函数和基本几何理论求出。
如图3,L为目标初始位置,其成像L’;L1为L旋转θ后位置,其成像L1’。且焦距f和目标实际尺寸L (L1= L)已知,目标在焦距处成像尺寸L’可由透镜成像公式计算出。得式(1)。

当f ,L,L’和p已知后,可得式(2)。






