・上一文章:AT89S51实现LED显示数字电压表设计
・下一文章:基于MCU和FPGA的LED图文显示屏控制系统
2.6 数字滤波器
电源的环路响应可以通过调整内部数字滤波器来实现,采用的是一个Ⅲ型的滤波器结构。改变环路响应可以设置低频增益、零点位置、极点位置及高频增益。这里推荐AD公司软件,软件GUI用于调节滤波器,可以显示出滤波器在bode图中的响应,并可以计算整个电源的稳定临界点。
从检测电压到周期,滤波器的传输函数计算公式如下式:
数字滤波器插入相位延迟到控制环中,数字滤波器电路将占空比信息送到PWM电路,然后开始每个新的开关周期。因此,附加的相位延迟到每个相位区间,φ由滤波器方框图插入,为
![]()
式中,fC为跨越频率,fSW为开关频率。在1/10开关频率处,相位延迟为18°,GUI结合此相位延迟进入计算。
两个寄存器的设置允许两个性质不同的滤波器响应。主滤波器也称正常模式滤波器,是由可编程寄存器0*60到寄存器0*63来控制的;其他滤波器称作轻载模式滤波器,其由可编程寄存器0*64到寄存器0*67来控制。ADP1043A用轻载模式滤波器,仅在负载电流在阈值下时才工作。
AD软件GUI允许用户调节轻载模式滤波器,与正常模式滤波器以相同方式管理。
此外,在软启动过程中,在使用数字滤波器的不同设置方式,软启动滤波器的值对应公式(1)中的a、b、c,其值为0,d的值通过软启动滤波器的增益设置来调节。
2.7 PWM和同步整流输出
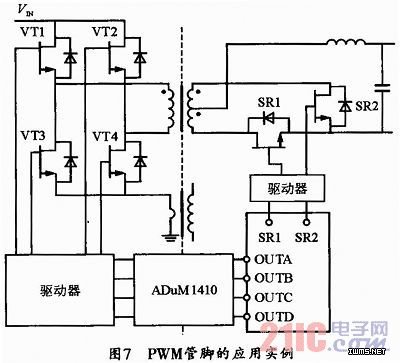
PWM和SR输出用于控制初级侧驱动和同步整流驱动,这些输出可以用于几个控制电路拓扑,包括全桥、相移ZVS、交错式双晶正激变换器,上升沿,下降沿之间的延迟可以独立调节,要特别注意防止交叉导通,图7所示的就是一个全桥移相的实例(具有同步整流的全桥)。
PWM和SR输出一起工作,因此当调节这些输出时,首先要适当修正全部寄存器,然后锁定ADP1043A。此时的信息,在重新调节时,输出要暂时禁止,一个专门的结构设置ADP1043A以确保新时段的信息可以同时调整,这一点由设置寄存器到1来完成,推荐PWM输出此时禁止。
OUTAUX是一个附加的PWM输出端.OUTAUX允许一个超级PWM信号产生与三个PWM输出不同的频率,该信号可用于驱动一个外部的功率变换器,诸如Buck变换器,其位于全桥变换器的前端。OUTAUX还可以用于时钟参数信号。
2.8 同步整流
SR1和SR2适用于同步整流的PWM信号,这些PWM信号可以同样设置成其他PWM输出,可以用两种方法调制:立即跟踪主PWM信号和在软启动形式下开启。当在软启动形式下时,信号从0占空比上升到要求的占空比,上斜的SR信号的优点在于减小电压上升步伐,这将完全出现SR FET完全导通时,可以使负载上升时的瞬态电压减小。
使用寄存器0x54,SR软启动可以调节,一旦出现第一时段的SR信号使能,或每个时段SR信号的使能。
当调节ADP1043A使用SR软启动时,要确保该部分正确的操作,要用设置SR1(t10)的下降沿比上升沿(t9)的小一些,用设置SR2(t12)的下降沿小于PSR2 (t11)的上升沿。
SR使能的速度大约是200μs,这可以确保步进负载,SR信号可以迅速的开启,以防止损坏所控制的MOSFET。
2.9 自适应死区时间控制
一个寄存器的设置称作自适应时间寄存器(ADT),允许PWM沿到自适应导通的死区时间飞跃。ADP1043A用ADT仅在调制范围低于死去阈值
时间时,AD公司软件GUI可使用户很容易的调节死区时间值。
每个独立的PWM的上升沿下降沿(t1-t14)都可以调节成独有的死区时间偏置,这个偏置可以是正,可以是负。偏置是相对于正常沿的位置。例如,如果t1有正常的100ns的上升沿,ADT设置t1是15ns,t1变成85ns的死区,低于自适应的死区时间阈值,死区时间由0*69—0*6F寄存器调节。
2.10 轻载模式
寄存器0*3B允许ADP1043A在轻载条件下关断PWM输出,轻载电流阈值可以调节,在低于此电流阈值时,SR输出被禁止,此时用户还能调节任何其他PWM输出到关断状态,这就允许ADP1043A用具有交错式两晶体管正激拓扑。在轻载时,并入相移,轻载模式数字滤波器也可用于轻载模式。





