2.2 信号采集模块
为实现发动机实时检测和控制,传感器必须能够准确地反映发动机的各状态参数,传感器的选型和传感器信号处理电路的设计对电控系统是至关重要的。曲轴/
凸轮轴位置传感器选用霍尔式传感器,它具有对磁场敏感、输出电压变化大和使用寿命长等优点。油门位置传感器选用电位式传感器,通过加速踏板绕转轴的转动,带动电位器触点的移动,使其输出电压在0.5~4.5V间发生变化。信号采集模块的设计必须保证信号的实时性和准确性,所以在电路设计中要加入大量的滤波和抗干扰元件。
传感器所产生的信号分两种:一种是数字信号,如曲轴/凸轮轴信号,经数字信号处理电路,进行滤波、放大和整形,转换成标准的方波信号,分别输入到
ATmega16的输入捕捉(ICP1)引脚和外部中断1(INT1)引脚。另一种是模拟信号,如油门位置信号,经模拟信号处理电路进行滤波后,输入到
ATmega16的AD转换输入通道0(ADC0)引脚。
2.3 信号处理模块
在
ATmega16中集成了ADC功能模块,它是8通道10位的逐次逼近A/D转换器,0-VCC的ADC输入电压范围。通过AD转换器可以将模拟信号转换成单片机可以处理的数字量,并保存在ADC数据寄存器中。
ATmega16的外部中断1,通过引脚INT1触发。中断可以由下降沿、上升沿、低电平,或任意逻辑电平变化触发中断。当外部中断使能并且配置为下降沿触发,只要引脚电平为下降沿,中断就会产生。
T/C1(Timer/counter1)是
ATmega16的一个16位多功能定时计数器。它的输入捕捉单元可用来捕获外部事件,并为其赋予时间标记以说明此事件的发生时刻,外部事件发生的触发信号由引脚ICP1输入。当该引脚上的逻辑电平发生了变化,输入捕捉被激发:16位的TCNT1数据将被拷贝到输入捕捉寄存器ICR1,同时引发一个中断。
气动发动机电控系统中,经处理电路处理过的曲轴位置和凸轮轴位置信号,接到ICP1和INT1引脚。当相应电平变化时就会触发曲轴、凸轮轴中断。凸轮轴中断子程序主要是用来判断压缩上止点位置的。在曲轴中断函数中,完成发动机转速计算,确定喷气定时,以及结合油门位置信号的AD转换值计算喷气量等,并通过PA7引脚输出信号控制执行模块。
2.4 功率驱动模块
功率驱动模块就是将单片机输出的控制信号转换成电磁阀的控制量,并实现对电磁阀执行相应操作的控制。高速电磁阀是整个气动发动机控制系统的执行器,是整个系统的关键的部件之一。由于喷射高压空气,而且要求在高速下完成电磁阀的开关动作。因此,对它的响应时间要有特殊的要求。本课题选用贵州红林车用电控技术有限公司的SP021高速电磁阀。
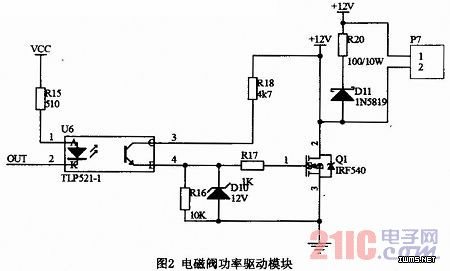
图2所示的是电磁阀功率驱动模块。其中,P7插座连接高速电磁阀,电磁阀线圈一端连接电源,另一端连接场效应管漏极。Q1是场效应管IRF540,起放大作用。U6是可控制的光电耦合器件TLP521-1,它广泛应用于电路之间的信号传输,将ECU与负载隔离,可以增加电路的安全性,减小电路干扰,简化电路设计。当ECU发出驱动信号,光耦导通,稳压二极管D10将场效应管Q1的栅极电压稳定在12V,漏极电流增大,漏极电压被拉低。此时,电磁阀线圈电流增大,线圈产生强大的电动势,电磁阀被打开。而当光耦截止时,电磁阀关闭,线圈中电路变化很大,会产生反电动势。R20功率电阻和D11肖特基二极管IN5819与电磁阀并联,防止场效应管被击穿。
2.5 通讯模块
气动发动机的控制系统是极其复杂的,不仅包括转速、油门位置等信号的采集处理;还要对电磁阀的喷气定时和喷气量完成精确控制等等。另外,气动汽车上还包括ABS、空调系统和车辆灯光等模块,这些模块需要实时共享车辆的数据,以达到整车的最优控制。传统的电气控制设计策略已经不能满足当今电气控制网络的需要,而CAN总线的数据通讯具有突出的可靠性、实用性和灵活性等特点。气动发动机电控系统通讯平台如图3所示。它具有布线成本低、通讯速率高和数据传输精度高等优势。

上一页 [1] [2] [3] 下一页





