・上一文章:基于覆盖网络的多路径流量均衡研究
・下一文章:基于DSP视频系统的CF卡FAT文件系统设计与实现
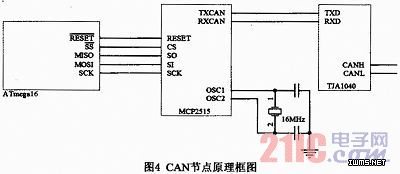
CAN节点原理框图如图4所示。本文采用TJA1040高速CAN总线收发器作为CAN协议控制器和物理总线之间的接口,选用MieroChip公司推出的MCP2515作为CAN总线控制器,它符合CAN2.0B技术规范并带有符合工业标准的SPI串行接口。ATmega16通过同步串行接口SPI与MCP2515之间完成高速的全双工的同步数据传输,MCP2515通过CAN物理接口芯片TJA1040连接到CAN总线上,完成气动发动机电控系统与PC机等的CAN通讯。
3 气动发动机电控单元软件设计
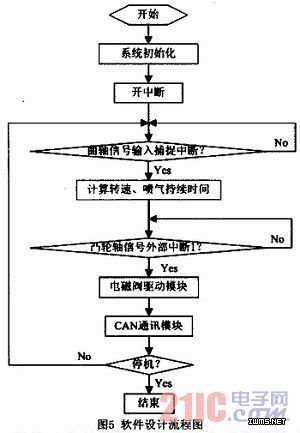
软件设计是气动发动机ECU开发的核心。软件设计应遵循模块化和标准化的原则,具有可扩展性;还要具有良好的抗干扰能力,可以实现自我诊断和保护,保证发动机稳定运行。气动发动机电控系统是对时间要求很严格的系统,它对喷气有很强的实时和精确的要求,主要通过中断程序的触发和嵌套来实现。系统的软件设计流程图如图5所示。控制软件由初始化模块、中断模块和主控模块组成。初始化模块主要完成对电控系统状态参数的设置和配置寄存器等任务;中断模块执行计算转速和判断压缩上止点及控制电磁阀喷气等任务;主控模块完成信号处理、确定喷气定时和喷气量以及CAN通讯等。
4 电控系统调试及总结
多次调试和试验证明,本文设计的气动发动机电控系统的ECU软硬件能够准确检测出发动机的不同转速等各参数;功率驱动模块工作可靠,具有良好负载能力;基于CAN总线建立的通讯平台能够实时监控发动机参数与状态,完成数据传输。试验还表明喷气压力对气动发动机转速有很大影响,在对气动发动机电控系统进行完善时,需要扩展喷气压力控制模块,以保证喷气压力稳定在合适的值,减少由于压力波动对发动机运行造成的不良影响。冷却水温、喷气温度和缸内压力等参数也对发动机运行具有一定影响,需要对这些参数进行实时检测,以便对喷气定时和喷气量等控制参数修正,使发动机运行得更加稳定和优化。





