・上一文章:五点式全自动捆钞机的原理与实现
・下一文章:如何使用NILabVIEW和DAQ创建微网能量管理系统(MEMS)
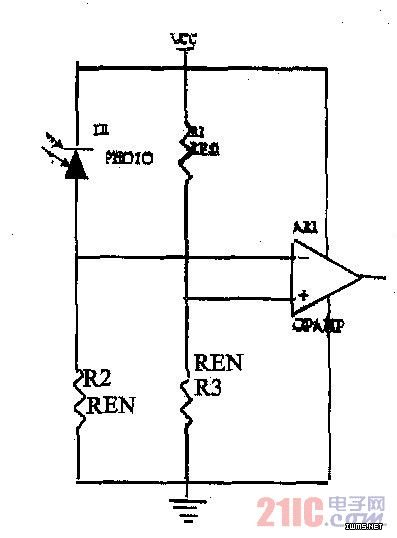
图14 红外线接收电路
4.2.3 显示电路
单片机接收到前面两部分电路反馈回来的信息并经过相应算法的处理后,得出前方物体的距离与方向等信息,一方面可以控制相应的被控对象进行相应的动作,另一方面可以通过LED显示相应的距离。本设计采用动态显示,以节省单片机的输出管脚,有利于简化系统,具体电路如图15所示。
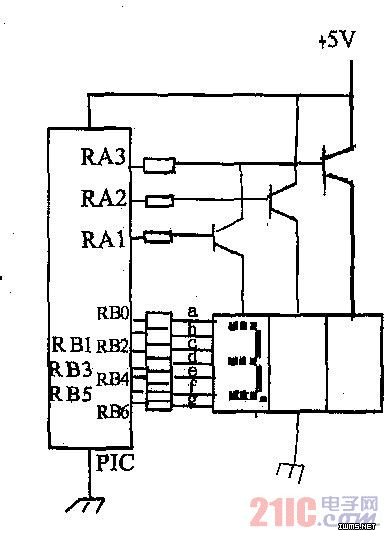
图15 系统显示电路
5 系统软件设计
系统工作时首先启动红外线传感器进行探测,当检测到有障碍物存在时,再启动超声波传感器进行测距,然后通过LED进行显示。如果检测到的物体在超声波传感器的测量盲区内,则根据红外线传感器的响应情况对距离进行估计显示。对应上述功能的程序框图如图16所示。
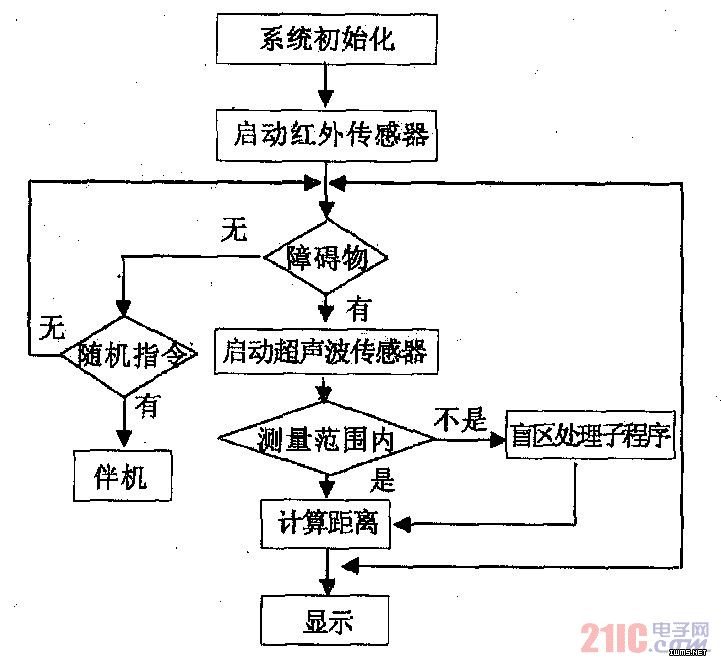
图16 系统程序框图
6 结语
本文采用超声波传感器和红外线传感器组成综合测距定位系统,克服了由单一传感器所构成探测系统的不足,同时具备了超声波传感器和红外线传感器探测的优点,能够比较精确地测距和定向。同时,系统还采用了单片机控制技术,使系统具有良好的扩展性和实用性。





