・上一文章:多床位心电监护仪设计与实现
・下一文章:基于CAN总线的语音节点设计方案
如今,可提供功能完善的硬件串口的微控制器比比皆是,那么我们为什么还要费力地用微控制器的端口管脚来实现软件UART呢?主要有以下几个原因:
首先,尽管确实有许多微控制器都包含了硬件UART,但仍有许多没有包含这种接口。在系统设计中,选择微控制器时,可能很难找到一款各方面都很理想的产品。例如,电压范围合适的微控制器可能内部存储器不够大,而存储器大小足够的可能又没有足够的端口管脚,无法满足设计需求。因此,通过软件方式实现某些系统需要的外设接口,从而弥补一款微控制器性能上的缺陷,就能增加可供设计选择的微控制器的数量和种类,从而增大设计的灵活性。
第二,即便一款微控制器包含了一个功能完善的硬件UART,由于某种原因,这对即将进行的设计来说可能仍然不够。例如,可能是微控制器需要与之通信的外设所用的协议与串口协议稍有不同,也可能是硬件UART所提供的位数、奇偶校验功能或输入和输出缓存无法完全满足应用的要求。这时,通过构建一个软件UART接口,我们在定义UART的功能和串口协议的细节上就更灵活。
第三,一款微控制器的硬件UART也许能够很好地满足应用的需求,但只是数量不够。例如,微控制器包含两个UART,而设计中的应用却需要三个。此时,我们不必仅仅为了增加串口的数量就另外增加一块新的芯片,而只需增加一个与该微控制器上现有的UART具备同样功能和特性的软件UART。
UART软件部分的实现
绝大多数的Linux软件开发都是以native方式进行的,即本机(HOST)开发、调试、本机运行的方式,但是由于在目标机上没有足够的资源来满足嵌入式系统的开发,所以这种方式不适合于嵌入式系统的软件开发。通常嵌入式系统软件开发采用交叉编译调试的方法。交叉编译的主要特征是某机器中执行的程序代码不是由本机编译生成,而是由另外一台机器编译生成。
串口通信的基本任务有:实现数据格式化、进行串/并转换、控制数据传输速率、进行错误检测和进行TTl与EIA电平转换。串口通信分为同步通信和异步通信两种类型,本文将用到异步串行I/0。
由于Linux系统将所有的设备都看成文件,所以访问串口时,认为串口是一个文件,我们可以使用文件系统控制函数实现基本的串口操作,比如open()函数用来打开串口,read()和write()函数用来读写串口,在传输数据完成后可以用close()函数关闭串口。
构造了一个嵌入式版本的Linux文件系统,它使得内核在系统尽量精简的情况下能够运行起来,并满足产品和系统各方面的要求。其中,为文件系统配置用户和属组以达到一定的安全性更是系统的一大特色。另外,在这个嵌入式文件系统中,引入了VFS的支持,虽然牺牲了一些空间,但是大大方便了今后各种物理文件系统的动态加载。Linux的文件系统事实上非常的庞大,构造一个嵌入式的Linux文件系统是一个很复杂的过程
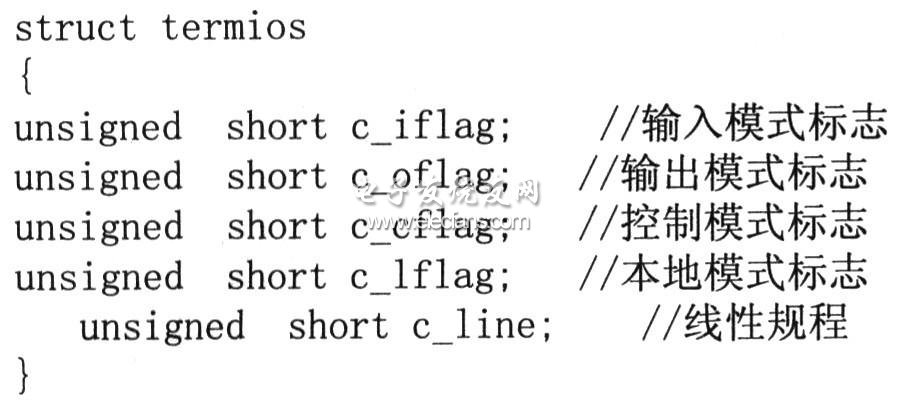
串口的基本设置
串口最基本的设置有波特率设置、检验位和停止位的设置。串口的设置主要是设置struct termios结构体的各成员值: