・上一文章:基于ADS的S3C2410实现嵌入式串口通信
・下一文章:基于GPRS的远程监控系统
文章针对现有的模拟广播系统存在抗干扰能力弱、传输距离短等不足,进行了基于CAN 总线的数字语音通信系统的研究。给出语音通信系统的总体构成,并对节点各模块进行详细设计。核心部分采用内置CAN 控制器PIC18F458 单片机作为控制器,与独立的CAN 收发器CTM8251 构成CAN 收发模块;采用低传输速率和高通话质量的AMBE-1000 芯片作为语音编码器。测试表明,节点间可以实现可靠,语音质量高的实时性通信。
引言
CAN 总线以其短帧、无损仲裁、多主工作方式、干扰能力强而应用于许多工业领域,如汽车行业、煤矿安监系统、智能仪表系统等。基于CAN 总线的数字语音通信系统就是利用CAN 总线的特点而设计的。利用该系统调度室可以在同一时间内通知矿井中的所有工作人员安全撤离,并按照矿井应急预案指挥抢险救灾;井下人员也可以及时与调度室联系,及时通报情况;井下也具有局部通信功能,方便井下人员直接的联系和通报事情。
1 语音通信系统的总体结构
基于 CAN 总线的语音通信系统的整体结构如图1 所示。

图 1 系统总体框架图
该系统由上位机PC、网关节点、语音节点、通信电缆、终端等构成,采用总线型网络、多主访问机制。地面可以通过上位机PC 对网关节点进行操作,实现对井下各个语音节点的任意呼叫(即点播方式)、各个组的语音节点的呼叫(即组播方式)或全部呼叫(即广播方式)功能;井下各个语音节点也可以呼叫网关节点,网关节点将该语音节点的ID 上传给上位机PC;并且井下各个语音节点可与其它同组的语音节点进行组内通话通信。在CAN 总线结构中,节点是可以灵活接入的,这是CAN 总线网络最有优势的地方,同时,由于不分主从,因此,每一个节点都可以接收信息或者在总线空闲的时候发送信息,这是CAN 总线的另外一个比较重要的优势。
2 语音节点硬件电路设计
语音数据通过麦克风输入,经过MAX9814 进行放大,然后送到数模转换模块进行A/D转换,再通过语音处理模块将数据压缩打包传送给微处理器,微处理器通过CAN 收发器将数据传到总线上;总线上的信息通过收发器传送给微处理器,通过微处理器传至语音处理模块,对其解压缩,送到模数转换模块进行D/A 转换,输出模拟信号再经过功放模块进行功率放大送到扬声器,最后由扬声器输出语音信号。
语音节点总体结构如图2所示。
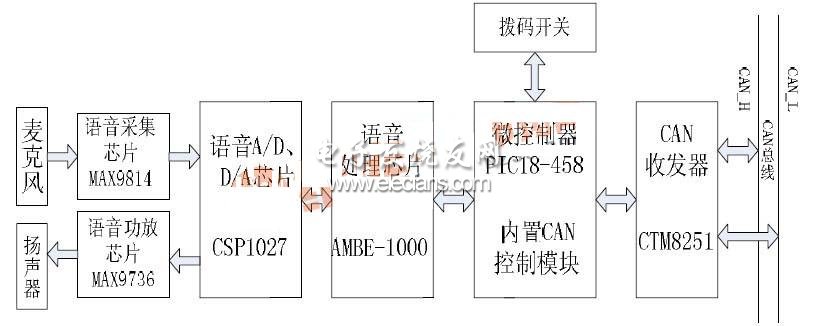
图 2 语音节点总体结构图
2.1 处理器模块
处理器模块是语音通信节点的计算核心,所有的设备控制、任务调度、能量计算和功能协调、通信协议、数据整合和数据存储程序都将在这个模块的支持下完成,所以处理器的选择在语音通信节点设计中是至关重要的。本设计采用带有CAN 控制模块的PIC18F458[4]单片机作为微控制器(MCU)以实现对AMBE-1000、CTM8251、 MAX9814、MAX9736 等芯片的操作控制,同时,单片机还需要控制一些按键和指示灯。在语音节点硬件设计中,PIC18F458 与各部分接口电路以及复位电路如图3所示。
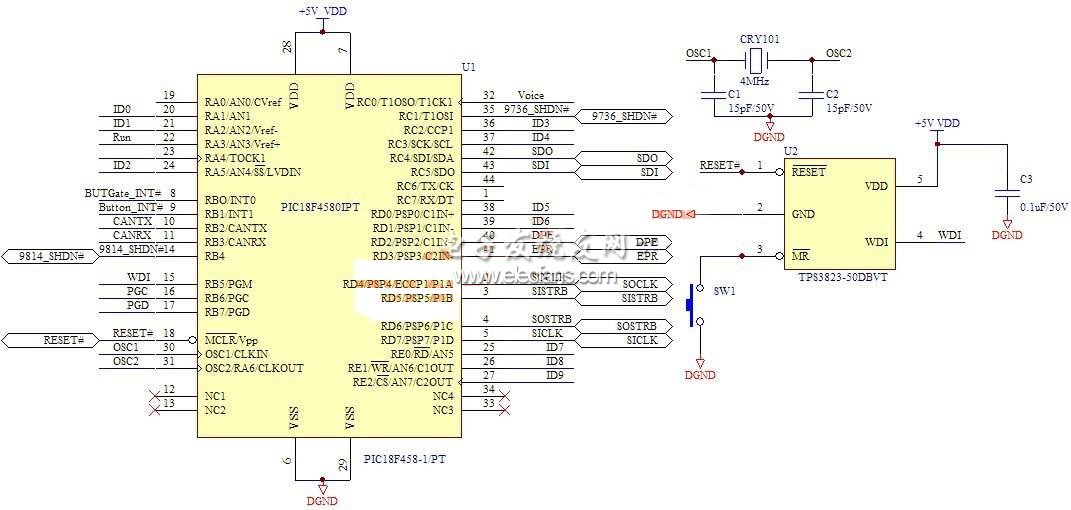
图3 PIC18F458 与各部分接口
拨码开关部分电路如图4所示,用来设置语音节点的标识符(ID),ID9-ID0 依次对应拨码开关的10-1,其中拨码开关上的10-6 键为组号,5-1 键为节点号,且拨码开关处于ON 的电平值为“0”,反之为“1”。每个节点根据标识符来判断自己是否需要接收报文。

图4 拨码开关





