2.3 运算控制模块
运算控制模块涉及标度变换、PID算法及该算法调用的乘法子程序等。
(1)温度标度转换模块。
控制系统读人被测量模拟信号,并转换成操作人员的物理量,这种转换就是标度转换。线性标度变换的公式为

式中,Y为参数测量值;Ymax为测量范最大值,Ymin为测量范最小值;Ymax为对应的A/D转换值;Nmin为Ymin对应的A/D转换值;X为测量值Y对应的A/D转换值。在本系统中Ymin=0,Ymax=100,Nmin=0。
(2)PID算法。
在模拟控制系统中,控制器最常用的控制规律是PID控制。工业控制算法常用位置型PID算法,经离散化后的算式为

式中,U(n)为第n个采样时刻控制器的输出量,e(n)第n个采样时刻的偏差值,Kp为比例系数,Ki为积分作用系数,Kd为微分作用系数。由于位置式算法每次输出与整个过去状态有关,算式中用到过去偏差的累加值

,容易产生较大的累计误差。而增量式中只需计算增量,算式中不需要累加,控制增量的确定仅与几次偏差采样值有关,当存在计算误差或精度不足时,对控制量计算的影响较小,且容易通过加权处理获得较好的控制效果。由于计算机只输出控制增量,所以误动作时影响较小,且必要时可用逻辑判断的方法去掉,对系统安全运行有利。
由于上述优点,所以增量式PID控制算法得到广泛的应用。其控制算法表达式为
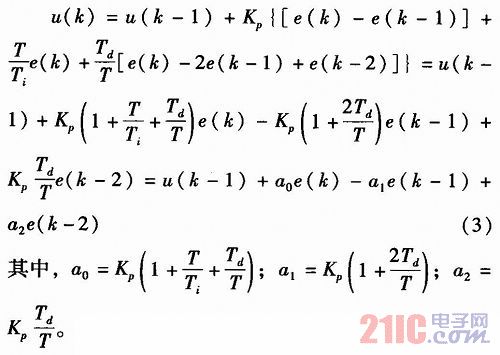
式(3)是PID位置式的递推形式,是编程时常用的形式之一。按增量式PID控制算法编程时,a0,a1,a2可预先算出存入固定单元。PID算法流程图如图5所示。

3 结束语
本嵌入式智能温度控制系统能够实时处理采集到的数据、通过键盘实现设定初始值并实时显示当前的温度值,采用PID闭环控制算法增强了系统的抗干扰能力,提高了智能系统的精确度,达到了较高的设计水平,是一种成本低且效果好的嵌入式系统。
上一页 [1] [2] [3]





