・上一文章:基于AT89C51单片机的钢井架自动控制系统的设计
・下一文章:松下DX-600CN型传真机电路原理分析
本文设计的遥控启停电动车,采用AT89C52作为小车的检测和控制核心)采用红外传感器进行里程统计、超声波及红外传感器进行目标识别与避障、步进电机对车的转向进行控制)实现精准定位;由发光管给出指示信号;车行驶中的各种功能控制由软件实现)同时采用红外遥控方式控制小车的启动、停止及状态转换,其中红外发射部分加入凌阳声控系统,实现语音控制。
硬件设计
系统方案框图如下图所示,详细叙述了各功能模块的具体功能说明。

前轮电动机驱动模块前轮采用从废旧软驱上拆下的步进电机及驱动芯片,其原理如下图所示。

两路输入信号的频率皆为40Hz,占空比50%,相差90。此时电机处于最佳状态。
后轮电机驱动模块后轮采用普通直流电机,通过控制脉冲占空比.实现小车速度的控制,这种调速方式具有调速特性优良、调整平滑、调速范围广、带载能力大,能承受频繁的负载冲击,实现频繁的无级快速启动、制动和反转等优点。
驱动部分选择L298推挽式功率放大电机专用驱动芯片,L298将分立电路集成在单片IC之中,使外围器件成本降低,整机可靠性提高,该芯片含有两个TTVCMOS兼容电平输入,具有良好的抗干扰性能;四个输出端具有较大的电流驱动能力,每通道峰值电流能力可达2A,原理图如下图所示。

由于在直流电机和后轮车轴之间加装了三级减速齿轮,小车速度已经降至较低水平,无需减速,所以前进时5脚输入方波占空比为100%,即持续高电平,7脚为低电平;后退时5脚为低电平,7脚输入方波占空比为100%。
红外遥控模块 红外遥控发射模块电路原理图如下图所示。

输入端由四个按键及凌阳语音模块组成,MCl45026的振荡器的频率为:f=1/(2.3RtCCtc),输出的三态编码波形如下图所示。
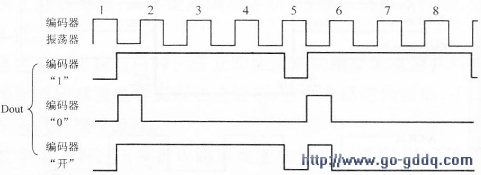
为提高传输信号的抗干扰能力,需将编码信号调制在较高频率的载波上发射,接收部分采用1838红外集成接收头,要求载波频率为38kHz,故采用CMOS门电路构成的脉冲调制振荡电路,振荡频率f=1/(2.2RtCt)。发射部分采用中功率三级管8550,利用其开关特性驱动红外发光二极管发射红外光。
红外接收头有较强的指向性,本文采用两个接收头背向放置方式,增大接收范围。1838红外集成接收头将红外接收管与放大电路集成在一起,如下图所示,
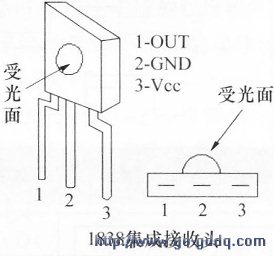
体积小、密封性好、灵敏度高,三管脚分别为电源正极、电源负极和信号输出端,其主要功能为放大、选频和解调,要求输入信号需是已经被调制的信号,经过放大和解调在输出端直接输出原始信号。
解码电路采用与MCl45026配对使用的通用接受解码器MCl45027,电路原理囹如下图所示,
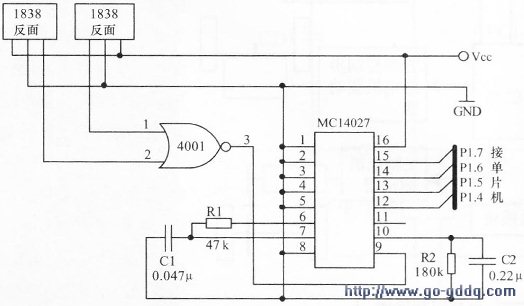
MCl45027将解调后的串行数据解码为BCD码,并使控制代码并行输出。其外围电路中的R1、C1组成的电路用于判定接收的脉冲是窄脉冲还是宽脉冲,时间常数R1C1应调整为1.72×编码器时钟周期,即R1C1=3.95RtcCtc;R2组成的电路用于检测接收的末位信号,时间常数R2C2=33.5×编码器时钟周期,即R2C2=77RTcCTc)该时间常数判定输入Din保留电平的时间是否已达到4个数据周期,达到则将提取的低电平信号送到控制逻辑电路)当控制逻辑电路有效传输的输出端VT为低电平时,传输终止。
避障电路的设计超声波发射模块,采用谐振频率为40.35kHz,谐振阻抗为125Ω,为提高发射功率,经CD4069放大后推动超声波换能器发声,振荡信号由单片机发出,原理图如下图所示。

超声波接收模块如下图所示,

超声波换能器SPEAKER将接收的微弱1言号,经交流耦合到LM358放大,放大倍数![]() 放大信号再经过交流耦合到LM358的另一运放,其放大倍数
放大信号再经过交流耦合到LM358的另一运放,其放大倍数![]() 总增益Au=Au1·Au2=30.R变经过放大的信号再由比较器LM393整形,输出标注为TTL电平信号。
总增益Au=Au1·Au2=30.R变经过放大的信号再由比较器LM393整形,输出标注为TTL电平信号。
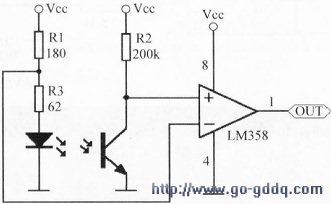
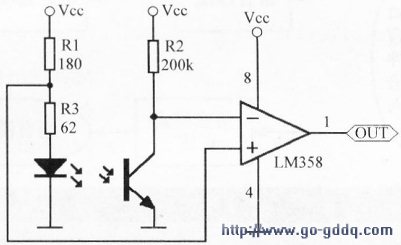
前轮转向中点校准模块使用TP805红外对管,直接从发射部分引出电压,作为比较器的阈值电压,简化了电路,具体电路如下图所示。
车轮转数及里程检测模块在车轮转轴上国定一塑料圆盘,挖出四道缝隙,夹角为90度,将红外对管圈定在正对前轮位置,准确测量车的里程。车轮转动时,接收头不断接收到红外光信号,得到的信号通过比较器产生脉冲,再发送至单片机,以实现车里程的检测,具体电路如下图所示。
转盘的制作图形如下图所示,
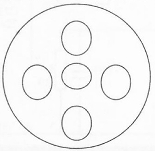
当遇到挡板时,光线无法透过,接收管截止,输出为高电压,该电压通过比较器后转换为高电平,即单片机的有效电平;当遇到狭缝时,光线透过,接受管导通,输出为低电压,该电压通过比较器后转换为低电平。轮盘每转动一周输出4个脉冲,单片机对该脉冲进行实时计数,若检测到n个脉冲数,则该段时间内的车里程S=车轮周长xn,同时单片机中实时存储车的里程。
附加功能
1.语音控制本文采用凌阳61板作为语音控制模块,配合红外线遥控器实现对小车的实时控制,共设置“正8宇”、“反8字”、“前进”和“停止”四种语音命令。
打开小车电源的,向遥控器输入“前进”语音命令,小车即一直向前行走,直到有“停止”语音命令输入;输入“正8字”语音命令,小车即沿着预先设定的正8字轨迹前进,在前进过程中如果输入“停止”语音命令,则小车立即停止前进,否则小车完成正8字路线;输入“反8字”语音命令,小车即沿着预先设定的反8字轨迹前进,在前进过程中如果输入“停止”语音命令,则小车立刻停止前进,直到它完成反8字路线。
在所有路径的行进过程中,“停止”命令都是有效的,也就是说,在任何情况下只要有“停止”命令输入,小车就会停止。
(1)麦克风录入和AGC电路,麦克风录入电路如下图所示,
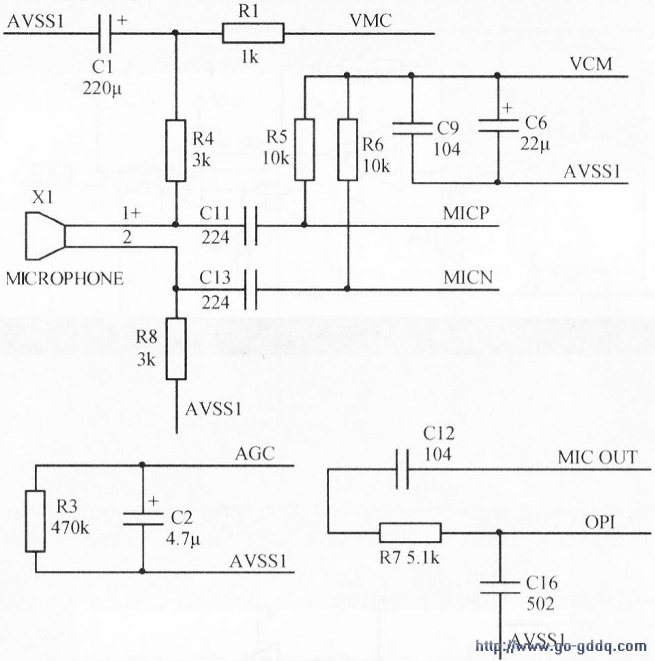
凌阳的SPCEO61A为16位单片机,具有DSP功能、很强的信息处理能力,具备运算速度高等优点,能很好地控制了本文的语音播放、录放、合成及辨识功能。
(2)语音识别,语音识别原框图如下图所示,

其中,实线部分为训练模块,虚线部分为识别模块,使用者可输入特定语音辨认词汇,该词汇可由使用者白行定义。
本文在启动小车前,系统将提示输入语音命令,作简单快速的训练纪录,此时输入“前进”、“停止”、“正8字”和“反8字”
四个语音命令,通过使用者的声音特性来加以辨认。
(3)语音播报电路,语音播报音频电路原理图如下图所示,

凌阳音频压缩算法根据不同的压缩比分为三种:SACM-A2000,压缩比为8:1、8:1.25、8:1.5;SACM-S480,压缩比为80:3、80:
4.5;SACM-S240,压缩比为80:1.5,压缩比按音质排序为A2000>S480>S240。
本文采用A2000压缩算法,凌阳CompressTool先把需要的语音信号录制好,SPCEO61A单片机DAC输出的电流,经SPYOO30音频放大,驱动喇叭放音,即实现语音播报功能,音频具体功能主要通过程序实现。
2.轨迹显示轨迹显示功能的具体实现方法为:在小车上方的一个小盒子里面装一些粉末,盒子的外面固定一个带有偏心轮的微型电机,电机的转动通过单片机控制。系统通过控制小电机的转与不转实现粉末的漏与不漏,当电机转动时产生剧烈的震荡,从而带动盒子震动,粉末就能从盒子底部的孔隙中露出来,在地面上留下清晰的痕迹;如果不需要轨迹显示功能时,则控制小电机不转动即可。
经测试,该系统行进途中可留下清晰的轨迹。





