・上一文章:数字调谐集成电路TA2104在收音机中的实际应用
・下一文章:遥控启停车的设计与实现(上)
在具有一定规模的建筑工地中必不可少的一种垂直运输机械便是钢井架了,它承担垂直运输各种原材料及半成品的责任,它的控制系统是至关重要的。
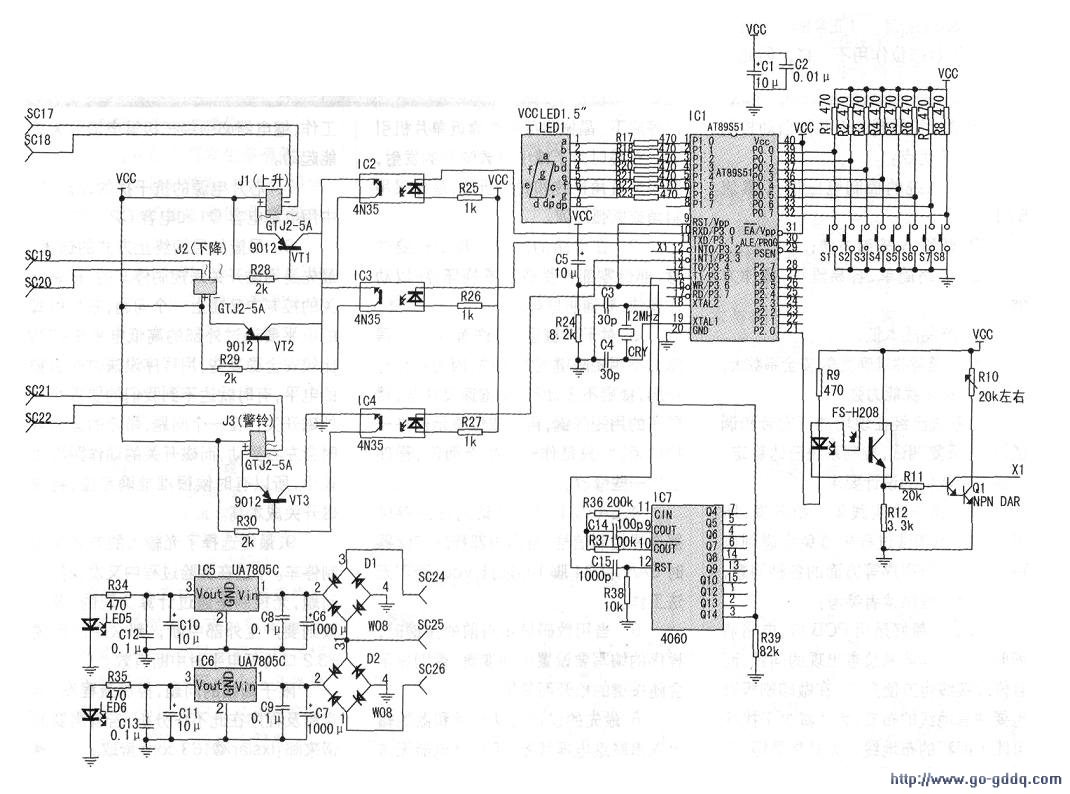
现今市面上也有多种控制系统,不过部份是通过硬件实现的,那么必然体积大,价格贵,停靠不准。如果用软件实现岂不是更准确可靠且体积又小,成本更低,因此着手设计。首先必须根据功能选择电路,其实现的主要功能如下:1、楼层的输入;2、上升与下降的判断;3、吊篮所处楼层的显示;4、吊篮的准确停靠;5、应急停机处理。从而选择AT89C51控制,其电路原理图如下:
设计思路是由低电压(5V)控制高电压(36V、220V、380V),这样的低压控制安全可靠,且利用了单片机控制达到准确定位的要求,其控制比硬件控制处理速度快,而且准确度高一些。对于某一特定的建筑物它的每一层楼的高度一定,那么吊篮上升或下降的高度可以确定,利用压在钢丝绳上的信号检测轮检测其上升或下降的高度来控制钢井架吊篮的停靠,这样不受牵引钢丝绳的滑轮打滑的影响。当电机起动后一秒内还没有计数时用软件要求断电处理,这样克服了因吊篮被卡而拉坏的问题。
键盘选择目标楼层(n),并用数码显示目标楼层,使操作者一目了然吊篮目前所处位置,单片机内部比较目标楼层与当前楼层,并自行判断是上升还是下降,并且进行计算。通过钢丝绳上的信号轮检测来判断吊篮上升(下降)的高度,从而控制其停靠。检测信号是“U”型光电开关的通断次数,再通过单片机处理,该系统的检测信号电路计数是在上升(下降)起动后才起动的,所以在上升(下降)前不会影响系统。软件上对键盘也进行了去抖动处理,吊篮在运行过程中按键自锁,所以在运行中就不会因为误动作而产生停车。而且起动前均有警铃警示,这样可消除一些安全隐患,这些都是通过软件来实现的,所以执行起来可靠、稳定。另外该系统还设置了紧急处理措施,并具有手动或自动转换来控制操作。
电路的选择方面,在输入级和输出级我们选择了光耦合器来传递信号,使输入输出电路在电气上是相互隔离的,它能有效地抑制系统噪声,消除接地回路的干扰,而且响应速度也快。电机的正反转是通过固态继电器来实现的,固态继电器的反应速度快,控制停靠准确。
用单片机控制的钢井架自动控制系统有以下优点:
①、系统的控制电压低(直流5V);②、体积小,安装方便;③、电路简单,容易维护,操作方便;④、产品成本低;⑤、吊篮停靠准确度高,安全系数大;⑥、抗干扰能力强。
此系统已经在现场进行安装和调试,经过反复调试,控制系统已达稳定,已经适合我们的设计要求。
作为第一次实践单片机开发,所以在设计和调试过程中难免会碰到电路、单片机及程序等方面的各种问题,下面列出一些供读者参考:
1、电路最好是用PCB板,电路清晰明了,这样容易检查出现的问题,而且修改接线也方便多了。在做印刷板时也要注意地线的布置,为了减少干扰尽可能大面积的布地线,尤其是晶振、芯片等底下。晶振要尽可能靠近单片机引脚,布线时为了减小高频噪声的发射,要避免直角折线和锐角折线,最好采用斜角或圆弧过渡。
2、在电路的焊接过程中也要注意,部份零部件受热容易烧坏,所以动作要快,要谨防假焊。
3、对于按键区,也许有人会觉得怎么不用矩阵键呢?是的,因为芯片有空脚,楼层不多,所以单键速度快些,楼层多的用矩阵键,再用双位显示也是一样的道理,只是作一些扩充而已,程序上作一些修改。
4、EA/VPP(31脚)访问程序存储器选择控制信号,当用内部程序存储器时EA/VPp(31脚)必须接VCC,否则无法工作。
5、当用数码显示当前的按键时,程序的编写要设置中间变量,否则显示会随按键的松开而复原。
6、最先的设计是从光耦和器的输出端串联继电器线圈,可是继电器无法工作,继电器必须经三极管电流放大才能起动。
7、芯片电源的抗干扰的设计,图中用电解电容C1和电容C2。
8、吊篮的层间终止方式的选择:最先是用磁开关来控制停车的,在磁开关的控制中又碰上一个问题,芯片引脚的电平要通过外部的高低电平来控制比较安全稳妥些,用程序没法改变引脚的电平,有时就达不到我们的要求。另外磁开关存在一个问题,吊篮的运动有时会左右晃动,而磁开关的动作距离比较小,所以有时候很难准确定位,再说磁开关成本高。
9、最终选择了光输入的方式来控制停车。不过在实验过程中又发现新的问题,光控制是通过计算实现的,要计数则要产生外部中断,那么中断则要P3.2口为低电平时中断有效。