・上一文章:单片机的多段语音组合录放系统设计
・下一文章:多MEMS传感器的嵌入式姿态测量系统设计
2.3 DSP后续软件处理流程
DSP后续软件处理流程如图4所示。DSP在CCS 3.3软件环境下计算完成。此处的基点(basepoint)是指最接近GPS信号消失前的具有有效GPS信息的移动物体位置,即GPS消失前2 s的移动端GPS信息(每秒测量1次)。角度计算是指DSP将距离信息转换为GPS经纬度信息。

3 程序实现及功能仿真
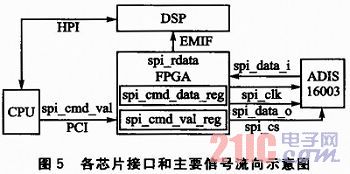
3.1 芯片资源
本系统采用的FPGA芯片为Cyclone III系列的EP3C120F80C7器件,DSP芯片为TMS320VC5510,惯导芯片采用ADIS16003。各芯片接口和主要信号流向示意图如图5所示,包括PCI、SPI、EMIF和HPI等主要外设接口。