����һ���£�LED����������˸�ĵ���������
����һ���£��ǽӴ�����IC����д����Ӧ�����
�������Ź��������ķ�չ��������������Խ��Խ��ľ���������Ҫ��ʱ��������ص㡣Ϊ�˱�֤��Щ���������Ļ������ܣ��������س�Ϊ�������壬�����������Ĵ��������ͱ���װ���س��ϡ��س�����Ŀ�ĵغ���ƽ̨���ٽ������������ˮƽ��������������ɺ�ƽ̨�ܹ����ٵس��ա�ת�ơ��ȱ�֤�������Ĺ������ܣ�������˻����ԡ�
������ͳ�ϣ���Ҫ�����˹��ֶ����ƽ̨��ˮƽ�ȵ��ڣ�����Ҫһ������Ա�ֶ�����ǧ�ﶥ������һ������Ա�۲�ˮƽ�ǵ�ˮ��λ�á����ֵ�ƽ��ʽ��ʱ�������Ҿ��ȵ͡����㸲��������ŵ�ƽʱ��͵�ƽ����Ҫ�����ߣ���ȥ�ĵ�ƽ��ʽ��ԶԶ��������ʵ���������Ҫ������ʱ��̡����ȸߡ����㸲����ǿ���Զ���ƽ���Ƽ���Ӧ�˶�����
�����ھ��÷��棬�Զ���ƽ����ϵͳ�㷺Ӧ���ڻ�������װ�á���������̹�˻�ص���̨��װ�����Ի����Ϊ��������ڱ�����ʹ���ڸ߿Ƽ�ս���У�Ϊ����������������������������Ҳ����˸��ߵ�Ҫ����Լ����ڻ����Ե���Ҫ�����ǻ���ڽ�����غ��м��貢������ˮƽ״̬��ʱ�䡣�Զ���ƽװ����������һ��Լ���صĹؼ��豸�����ŵ���Ԫ�������Զ����Ƽ����ķ�չ���Զ���ƽװ�ò������������������·�����ʹ�õ�ƽʱ��͵�ƽ�����ϸ����ս��Ҫ��
������ƻ���ڳ����ƽװ�õ�Ŀ����ʹ�������ͣ������ʱ���س��ܹ�Ѹ�ټ��裬ʵ������ϵͳƽ̨��б�ȵĿ��ٲ��������������������ʹ����پ�ȷ�شﵽˮƽ�����ڱ�֤����ڹ������ܵ����������̶ȵ����ϵͳ�Ļ����ԡ�
�����Զ���ƽϵͳ��չ���Ƹ���Ŀǰ����ƽ�����������죬����������������Ҫ��IJ�����ߣ�Ҳ��Ӧ����˶Ե�ƽʱ��͵�ƽ���ȵ�Ҫ����֮����Ӧ���Զ����Ƶ�ƽ����Ҳ���Ϸ�չ���Զ���ƽϵͳ�ķ�չ������Ҫ�ǣ�
������1����ȷ�ԣ�ϵͳ�ľ�ȷ����Ҫȡ������Ǵ������ķֱ��ʡ������½ṹ���²��ϡ��¹��պ��¼����ڸ߾�����Ǵ������е�Ӧ�ã���Ǵ����������ܴ���ȵ�����ˣ���Ǵ��������Ӵ�ͳ��Һ��ڡ������ԭ�����ŷ����ٶȼ���ƽ�⡢������ԭ����չ����Ǵ������ķֱ����Ѵﵽ0.001�Ȼ���ߡ�
������2���ȶ��ԣ�Ϊ����Ӧ�ִ����������ԺͿ��ٷ�Ӧ����������Ҫ����ƽ̨�и��ߵ��ȶ��ԣ����û����ŷ�ϵͳ�����Һ�ŷ�ϵͳ�����ϵ�Ƭ��ϵͳ�ɿ����뿹���ż����IJ��Ϸ�չ���춨�˵�Ƭ��ϵͳ�ȶ��ɿ������Ļ����������Ǽ�����봫���������ķ�չ��ʹ���ȶ��Եĵ�ƽϵͳ����ʵ�֡�
������3�������ԣ�Ŀǰ����Ǵ���������Ӧ�ٶ���������ߣ�������Ǵ�������Ӧʱ��ﵽ��5���룬��Ӧ�ٶ�Ϊ200��/�룬�ټ�����ϵͳ��Ӧ���Ƚ������㷨����ʹ�õ�ƽϵͳ�ĵ�ƽʱ���������ˣ�Ҳ�����������ϵͳ�Ŀ����ԡ�
������4���ɲ����ԣ����Զ���ƽϵͳ��������˻�������ʾ��壬ͨ����ͼ�ν�����ʾϵͳ��״̬������ʵʱ�����������ݹ�����Ҫ��ϵͳ���в������á���������ж�����ܼ����ɸ�����Ҫ���ɶ��壬ʵ�ֵ�ƽϵͳ�ĸ��ֲ�������Щ����ʹϵͳ�Ŀɲ����Եõ������ߡ�
���������ƽװ��������ƻ���ڳ����ƽװ��������ư�������Ǵ�������ѡ�͡����ݴ���������������·��ơ������ƽװ�û��Dz������Ͻ�����ӹ���������Ǵ���������·�塢��غ����߷���ģ��ȣ�ˮƽ�������������ݶ��������������ʺϽ�֣�������Ⱥ�ˮƽ������ˮ�DZ������������λ�ڻ��ǵ��Ϸ���ʹ��ʱ��š�ϣ�װ��ʱ�����۵��ŵ�����š�¡������ƽװ�ÿ���ԭ����ͼ1��ʾ��
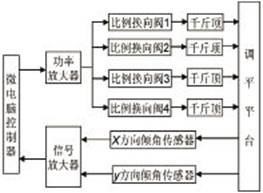
����ͼ1 �����ƽװ�ÿ���ԭ��ͼ
������Ǵ������������������������ʽ
������Ǵ�����ѡ��
������Ǵ��������ڸ�Ӧ����ڳ�����ݺ�����б�ȣ���������Ҫ�پ��ȸ���±0.012°����ʹ�û����¶�Ϊ��40��~��55�档������ЩҪ��ѡ�ñ����������Ƽ���˾��TW-TS1110��Ǵ��������ô������ڲ����ø������ִ��������Զ�ά�������ٶ���Ϣ���д�������̬�ǽ��㣬�����ýǶ��������ģʽ������ٶ�Ϊ5Hz��������ΧΪ±15°���������ȣ������≤±5°ʱ������Ϊ±0.005°�������≤±15°ʱ������Ϊ±0.01°�������≤±30°ʱ������Ϊ±0.035°�����������ù�̵��輼������������������˴�ͳ��Ǵ�����ֻ����С��Χ���ܱ�֤���ȵ�����ʹ����Ǵ�������ȫ������Χ�����Ի�������ͬһ�����ָ�ꡣ������������������λ���Բ������������п����ȶ���������������ظ���Ϊ0.0015°�����ö�̬�����˲���������������ͣ��Ҿ��нϸߵķֱ��ʣ��ֱ���Ϊ0.002°���������ڲ����ö�̬��λ����������У���������ʺ϶��ֻ���ʹ�ã�ʹ�û����¶�Ϊ��40��~��55�档
���������������������ʽ
����1 �������ݸ�ʽ����
������ASCII�뷢��ʽ�����Ƕȣ���24 FF XX XX XX XX XX 0D 0A
����˵��——24��ͷ��ʶ$��FF���Ƕ�ֵ�ķ���λ(+2b/-2d)��XX��ASCII��Ƕ�ֵ(30~39)��0D 0A���Ƕȷ�����β��ʶ�������У��س�����
�����ڶ������뷢��ʽ�����Ƕȣ���AA XX XX CC
����AA���Ƕȷ�����ͷ��ʶ����XX�������Ŷ���������5����DZ�ȣ�6000bit/�ȣ�15����DZ�ȣ�2000bit/�ȣ�30����DZ�ȣ�1000bit/�ȣ�60����DZ�ȣ�500bit/�ȡ�
����CC��У���룻CC=�����ֽ�1+�����ֽ�2��
����2 ���������ʽ����
�������Ƕ������ʽ��ͼ2��ʾ�����������Ӧ����ģʽ����Ч��ÿ�����������й̶�ID��(FFFF)���û�ID�֣��û����趨����ʼΪ0000����2��ID�ֶ��ɶ��Ƕȡ�
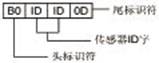
ͼ2 ���Ƕ������ʽ
���ݴ���������������·���
��������ϵͳ���������ִ���ϵͳ�ļ�ƣ���ϵͳ����������ģ��Ϊƽ̨���ڲ�Ӱ��װ����������£�ʵ�������ն�֮��������Ϣ�����ߴ��䡣���ݴ�����������������Ҫ�����ǽ�����Ǵ��������������������ÿ��ǧ�ﶥ��Գ���ˮƽ����Ҫ�����ĽǶȣ���ͨ����������ģ�鴫�������ָʾ����
����MSP430F149��Ƭ�����
������Ƭ�����пɿ��Ըߡ����ĵ͡���չ�����С���۸�ͺ�ʹ�÷�����ŵ㣬�㷺Ӧ���������DZ���ר���豸���ܻ����������̿��Ƶ�������Ч������˿��������뾭��Ч�档�����ѡ��TI��˾��16λ�����Ļ����������MSP430F149����ͼ3����Ϊ���Ŀ�������������Ҫ�ص��ǣ�
������1���͵�ѹ��������
�����õ�Ƭ���ĵ�Դ��ѹ����1.8V~3.6V�͵�ѹ��RAM���ݱ��ַ�ʽ�ºĵ��0.1μA����2.2V��1MHz��Ƶ�Ļģʽʱ��������Ϊ280μA��I/O����˿ڵ�©��������50nA��
������2��ǿ��Ĵ�������
�����õ�Ƭ��Ϊ16λ�ľ���ָ�(RISC)�ṹ�����зḻ��Ѱַ��ʽ��7��Դ������Ѱַ��4��Ŀ�IJ�����Ѱַ��������27���ں�ָ���Լ�������ģ��ָ������ļĴ����Լ�Ƭ�����ݴ洢�����ɲμӶ������㣬���и�Ч�IJ�������������ϸߵĴ����ٶȣ�һ��ʱ�����ڿ���ִ��һ��ָ�ʹ��Ƭ����8MHz������ʱ��ָ���ٶȿɴ�8MIPS��
������3���ḻ��Ƭ����Χģ��
�����õ�Ƭ�������˽Ϸḻ��Ƭ�����裺ģ��Ƚ���A����ʱ��A����ʱ��B������ͨ�Žӿ�USART0��USART1��Ӳ���˷�����12λADC���˿�1~6�����Ź��ȡ�
������4��ϵͳ�����ȶ�
�����õ�Ƭ�����ϵ縴λ��������DCOCLK����CPU����֤�������ȷ��λ�ÿ�ʼִ�У�ͬʱҲ��֤�˾����������㹻��������ȶ�ʱ�䣻֮��ͨ�������������ʵ��ļĴ����Ŀ���λ��ȷ������ϵͳʱ��Ƶ�ʡ���CPU�����У����MCLK�������ϣ�DCO���Զ���������ȷ��ϵͳ������������������ܷɣ������ÿ��Ź����临λ��
������5�������Ч�Ŀ�������
����MSP430F149Ƭ����JTAG���Խӿڣ����пɵ��д��FLASH�洢������˲�����ͨ��JTAG�ӿ����س���FLASH�ڣ�����JTAG�ӿڿ��Ƴ������С���ȡƬ��CPU״̬���Լ��洢�����ݵ���Ϣ������ߵ��ԡ����ڵ�Ƭ����֧�ִ������߱�̣�ʹ������ø��Ӽ�㣬���ҿ����ķ������۸����������Ҫ����ı������
��������������·�����
�������ݴ���������������·�����Ҫ��������������·����Ǵ������ӿڵ�·����������ģ��ӿڵ�·����Դ��·�ȡ���������ԭ���ǣ�ϵͳͨ�ϵ����������������Ǵ��������̶����������ڳ�����̬�������յ��ļ�������㴦��������ÿ��ǧ�ﶥ�ĵ���������ͨ����������ģ�鷢������ָʾ����
������1�������������ӿڵ�·���
��������������MSP430F149��Ƭ��������1��TTL-RS232��ƽת������Ǵ����������ڽ��մ�����������ݣ�����2 TTL��ƽ����������ģ�飬���ͳ����ݺ�����б�ǶȺ͵����Ƕ�������ָʾ���������������ӿڵ�·��ͼ3��ʾ��
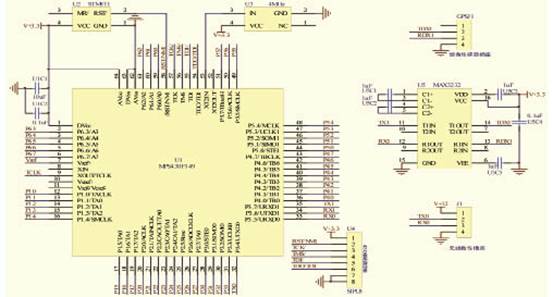
ͼ3 ���������ӿڵ�·ͼ
������2����Դ��·���
������Դ����12V/1000mAh��﮵�أ�ֱ��Ϊ��Ǵ��������磬�پ���·DC-DCת�����ֱ�ת����9V��3.3V��9V��ԴΪ��������ģ�鹩�磬3.3VΪ�����������ӿڵ�·���磬����·����LM317оƬ��������ʽ��硣��Դ��·��ͼ4��ʾ��
������3����������ģ���ѡ��
������һЩ����Ե��ϵͳ�У����洫�����������Ǵ����������¡��ڶ�����²����������ߵĸ��Ӳ��㣬���Ҵ����Ŷ�·�������������ɱ��ߣ����ϻ�������ϵͳ�ĵ��Ժ�ά���������Ѷȡ����⣬��һЩ�����Ӧ�ó��ϣ���Ҫ����������������Σ�յķ�ջ����н��й�������ͼͨ�����ߵķ����õ����������ź���Ȼ����һ���Ѷȵġ����������߷�ʽ��ʵ���źŵĴ��ͣ����Խ����һ���⡣������ߴ��䣬���ߴ�����в�ռ�ݿռ䡢û�в���Ҫ�ɱ��͡��ɿ��Ըߡ�ά�����㼰�����еĸ��Ž��ٵ��ŵ㣬��Ҳ��һ���̶�������˴���Ŀɿ��ԡ�
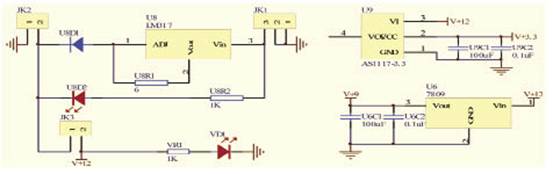
ͼ4 ��Դ��·ͼ
��������ʵ����������IJ���ZT-TR43F��������ģ�飬����һ�������շ�һ��ĵ���ͨ��ģ�顣��ģ��ļ���ָ�����£����ز�Ƶ��Ϊ433MHz������Ƶ��Ϊ428MHz~435MHz��������书��5mW�����������ȩ�105dBm���۲���FSK���ƣ�����ǰ���ŵ��������룬����������ǿ�����а˸������ŵ��ɹ�ѡ�ݴ�������9.6kbps�����������Ŵ���LNA�����ʷŴ���PA��ѹ������VCO�ȴֹ��ܼ�����оƬ�ڣ���Χ��·�����ڿ��������ø���������ģ�飬����ʹ�����ƽװ������ij�ͻ���ڵ�ƽʱ����������Ҫ���ʵ���ͨ�ž��룬һ���Բ�����30mΪ�ˣ�ͨ�Ź��ʹ���ʹͨ�ž����Զ�������������֮������ţ��ڽ�ǿ�Ŀ�����������ϵͳ�ڽ�ǿ����������Ҳ�������������۽ϵ͵Ĺ��ģ���װ��Ұ��Ӧ�ã��̶������Դ��ֻ�ܿ����ά��ϵͳ���С�
��������ģ��ZT-TR43F�뵥Ƭ���ӿ��ṩ��RS232/TTL/RS485���ֽӿڷ�ʽ����ϵͳ����TTL�ӿڷ�ʽ��������MSP430F149��Ƭ���Ľӿڡ�����MSP430��Ƭ����RXD��TXD�ڷֱ�������ģ���TXD��RXD����ӣ������������ӡ�
�������ǵ����Ż����ͬʱ��ƽʱ���ж����ƽװ��ͬʱ������Ϊ��ֹ֮������ţ���ȡ��ͬ��ͨ���ŵ���ͬ���뷽ʽʶ��ÿ��װ���ϴ��в����̣�ͨ�����������ø��Ե�ͨ���ŵ���ʶ���롣
���������Ƕȵļ���
���������������յ�������ݺ�����б�ǶȺ���Ҫ����ÿ��ǧ�ﶥ��Ե����ĽǶȣ��Ƕȼ���ļ��ι�ϵ��ͼ5��
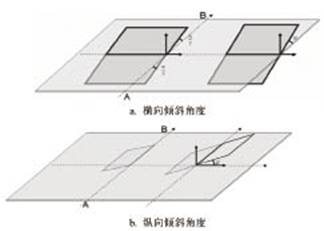
����ͼ5 �Ƕȼ����ϵͼ
������ͼ5��ʾ������ˮƽ��б�Ƕȿɷ�ӳ�ں����������������ͼ5��a��b�ֱ�Ϊ�����������б�Ƕȣ���α��βΪ��Ǵ������ó��ĺ��������Ƕȡ���α����0����A��ǧ�ﶥ��ߣ�B��ǧ�ﶥ��͡�����ǧ�ﶥ��λ��ԼΪα/2����AB�˵�����һ��ľ��룬Ȼ�����ǧ�ﶥֱ������ˮ���ݾ��С���β����0����A�˺�B��ͬʱ��ͣ���βС��0����A�˺�B��ͬʱ��ߡ���߹����е���ǧ�ﶥֱ������ˮ���ݾ��С�
�����������
������1����������
��������������Ҫ�У��ټ�����ָʾ������״̬����������ȡ�ݺ�����б�ǶȲ���ƽ��ֵ���۽��Ƕ�ֵ��������ָʾ����
������2������ƽ̨
������������ѡ����װ��Ӳ���е�Ƭ������Ӧ��IAR����ƽ̨��ʹ��C���Կ�����
������3����������
������ƽ������ɶ�ȡ�����������б�Ƕ�ֵ��ģ����ʾˮ����ָʾ�����㲢��ʾ����ǧ�ﶥ��������ȹ��ܣ��乤��������ͼ6��ʾ�����е�Ƭ����ȡ�Ƕ����ݵ�������ͼ7��ʾ�������ƽװ�ö˳���ͨ�����ڶ�ȡ����Ǵ��������ݡ�����б�Ƕ�ֵ�����ݽǶ�ֵ�ֱ���������ǧ�ﶥ�ĵ��������ģ��ˮ���ݵ�����λ�����꣬Ȼ����Щֵͨ������ͨ�ŷֱ��͵����Ҳ���ָʾ���ϡ�

ͼ6 �����ƽװ����������ͼ

ͼ7 ��ȡ�Ƕ���������ͼ
����������
�����߾��ȵ�ƽװ����Ҫ���ڳ��ػ����ƽ̨�͵�������ƽ̨�ȣ�������Դ�ͳ����ƽ̨�����˹��ֶ�����ƽ̨ˮƽ���Ӷ����µ���ʱ�䳤�����ȵͣ���������Ӱ�쵽����ڵ������Ļ����ԺͿ��ٷ�Ӧ����������˸��˵Ĺ۵����ơ����Ļ���MSP430F149��Ƭ������ij�ͻ���ڳ����ƽװ�õĿ���ԭ���ͽṹ��ƽ����˲������õ�ƽװ�ý�������������ģ����������������л��ؽ����һ�𣬿�ʵ�ֳ�����б�ȵ��Զ����ټ�⡢����ʹ��䡣��װ�þ��м��Ѹ�١��������Ͳ������ŵ㣬����Ч���ij�ͻ���ڵĻ����Ժ͵�ƽ���ȡ�





