・上一文章:1kW全固态PDM发射机调制器无电源输入
・下一文章:西门子S7-200PLC在皮带润滑系统中的应用
开关量控制系统编程,通常是根据电气控制原理,按被控对象对控制系统的具体要求绘制梯形图进行编程,这种经验编程方法适合于对简单控制过程的编程。控制过程较为复杂的,由于学生编程经验和编程技巧不足,在编程过程中常常遇到不能解决的问题。此时,如果采用步进控制方法编程就容易多了。
步进控制编程是一种根据系统的功能图,以步为核心,以各步之间的转换条件为触发信号,以各步对应的动作为驱动输出,从首步开始一步一步地绘制梯形图,直到把整个程序完成的编程方法。该方法编程效率高、不易出错,因而对开关量控制系统一般用此法编程。
在教学过程中,为了让学生较快掌握开关量控制系统编程.常采用以上方法。下面通过一小车的运行控制过程编程来说明。
例:某小车停在初始位置时限位开关XO01接通,按下启动按钮xooo.小车按下图所示顺序运动,最后停在初始位置.试绘制出小车运行过程梯形图程序。
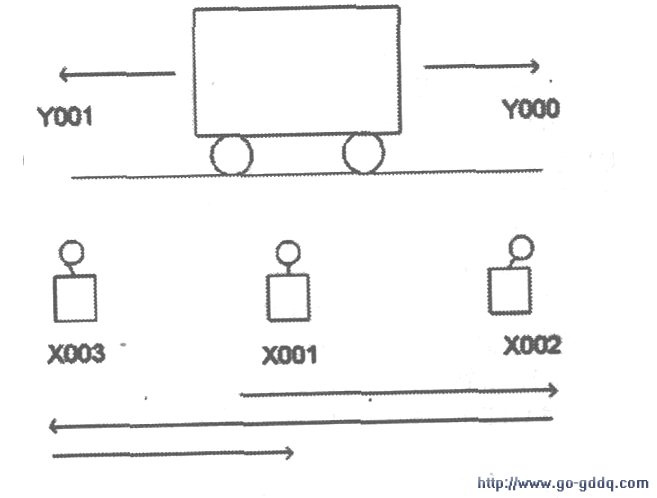
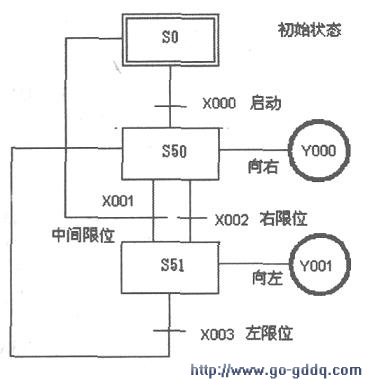
分析:此小车的运行控制过程,可利用电动机的正反转来实现。小车具有三种状态:停止、向左、向右,也就是三步。要实现小车的控制功能,首先要绘出功能图,再根据功能图绘制梯形图程序。
1.绘制小车控制功能图
功能图中使用状态继电器S代麦各步,xooo、XOOI、X002、X003代表转换条件.YOOO、YO01代表动作输出,如下图所示。
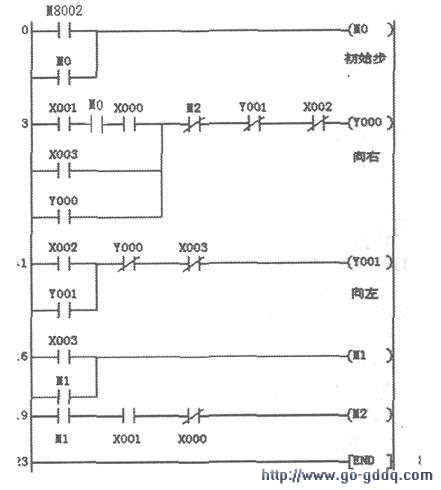
2.按经验编程方法绘制梯形图
如下图所示,该方法采用电气控制设计启保停编程思想,在代表各步的软继电器上都加有启保停环节。如初始步MO的动合触点与转换条件XO01、xooo串联后作为YOOO的启动环节,这样,只有当前级步MO接通且转换条件满足时,后续YOOO才能接通,自保环节由YOOO的动合触点与启动环节并联实现。由向右到向左转换则是将X002的动断触点和动合触点分别接到YOOO和YOOI输出支路实现,互串在两线圈中的YOOO和YO01动断触点则起到联锁作用,使YOOO 和YO01在任何时刻均只能有一个输出。
此编程控制的难点,是如何使小车在运动结束时停在限位开关XO01处。因为小车由右向左的过程中也会压下XO01.但此时小车却不能停,本编程是将小车压下X003作为小车停的前提条件,只有压下X003后Ml才能接通.Ml动合触点和XO01动合触点同时接通时M2才能有输出,接在YOOO输出支路中的M2动断触点才会动作使小车停止。为保证下一轮运行继续进行,这里将xooo的动断触点接在M2的输出支路中,按下启动按钮xooo时M2复位。
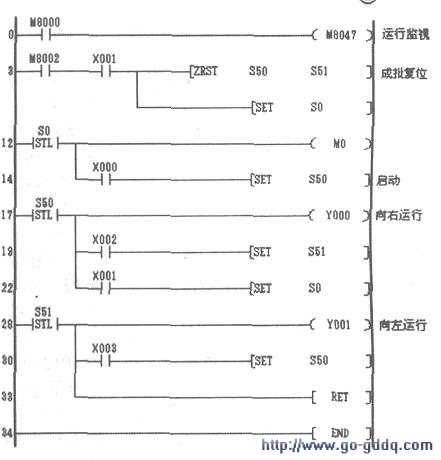
3.按步进控制编程方法绘制梯形图
如下图所示,功能图中使用状态s00代表初始步.s50代表向右运行步.S51代表向左运行步,用STL步进指令编程。XOOI压下时系统处于初始步.s0接通,按下按钮xo00,系统由初始步转到s50.s50的STL触点使YOOO接通,小车向右运行。至最右端压下右限位开关X002,使S51置位,系统程序将前级s50复位.S51的STL触点使YOOI接通,小车向左运行。至最左端压下右限位开关X003.使s50再次置位,系统程序将前级S51复位.YOOO也再次接通,小车向右运行,至初始位置压下限位开关XOOI.使so置位,s50复位.YOOO输出失电.小车停在初始位置。