・上一文章:Boost升压电路中磁环磁芯测试对比
・下一文章:基于FPGA的VGA波形显示方法研究
控制方法
图1所示为电感电流连续流动的连续传导工作模式。输出电压经分压器R1与R2分压后由反馈引脚FB读取,并通过低增益跨导(gm)放大器在误差比较器上与0.8V参考电压VREF进行比较。如果反馈电压下降且gm放大器输出低于0.8V,则误差比较器将触发控制逻辑,生成一个导通时间周期。导通时间周期长度将由固定tON估计电路预先确定:
其中,VOUT为输出电压,VIN为功率级输入电压,fSW为开关频率。
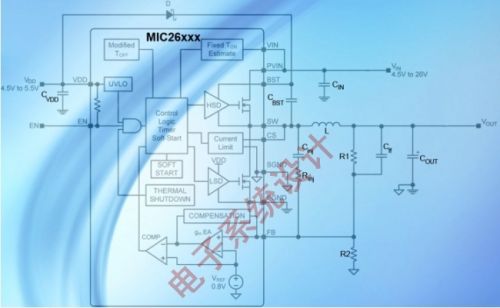
图1:MIC26XXX系列内部模块图。
在导通时间周期完成后,内部高压侧驱动器将关断高压侧MOSFET,而低压侧驱动器将导通低压侧MOSFET。在大多数情形下,关断时间周期长度取决于反馈电压。当反馈电压降低且gm放大器输出低于0.8V时,将触发导通时间周期,此时关断时间周期结束。如果反馈电压决定的关断时间周期小于最小关断时间tOFF(min),则控制逻辑将用tOFF(min)来取代。tOFF(min)是在升压电容(CBST)中维持足够的能量来驱动高压侧MOSFET时所必需的时间。从tOFF(min)获得的最大占空比为:
 ,其中tS=fSW。
,其中tS=fSW。
在稳态工作时,最好不要使器件的关断时间接近tOFF(min)。另外,在像24V到1.0V的高VIN到VOUT应用中,最小tON会导致较低的开关频率。在负载瞬变过程之中,由于关断时间变化,开关频率也将改变。
为更好地解释控制环路工作情况,现在将稳态与负载的瞬态情况都讨论一下。为了便于分析,假设gm放大器增益为1,这样,误差比较器的反向输入与反馈电压相同。
图2为稳态工作时的控制环路时序。稳态时,gm放大器通过检测反馈电压纹波(此纹波与输出电压纹波及电感电流纹波成比例),来触发导通时间周期。导通时间由tON估计电路预定,关断时间终止由反馈电压控制。在反馈电压纹波的底部(VFB下降到低于VREF时产生),关断周期结束,控制逻辑电路触发下一个导通周期。
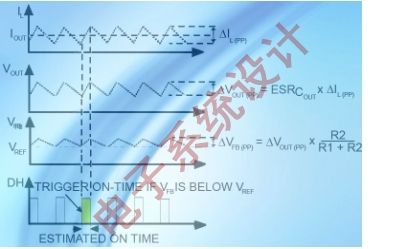
图2:稳态响应。
图3a与3b显示了传统PWM控制拓扑与麦瑞半导体Hyper Speed控制拓扑的负载瞬变工作情况。在标准的PWM控制方法中,负载瞬变时,占空比将增加,并且在维持开关频率相对不变的同时,输出需要一个完整的开关周期来响应。使用Hyper Speed控制拓扑,开关频率将在负载瞬变过程中改变,而一旦输出稳定在新的负载电流水平,则将恢复标称固定频率。由于占空比和开关频率发生变化,因此输出恢复时间很快,并且输出电压偏差小到可以忽略不计。





