・上一文章:变频群时延的测试
・下一文章:有线数字电视用户端电源干扰的原因及防护措施
关键字:矢量网络分析仪 Wiltron360B 射频仿真
一、 引言
射频仿真系统的子系统-天线阵列及馈电系统,主要用于模拟弹目间的视线角运动,为了保 证天线阵列及馈电系统的角位置模拟精度,必须对天线阵列系统进行校准。所谓校准是指为阵列控制计算机所存贮的表格获得项目数据,这些表格用于对天线阵列系统进行补偿和控制,实质上,就是要测量天线阵列系统中程控微波器件的表格,即插入衰减和插入相移。
因此,
二、 矢量网络分析仪Wiltron360B
矢量网络分析仪Wiltron360B由矢量网络分析仪、信号源、测试座、测试座转换器等各自独立的仪器,通过GPIB接口和专用接口组成一个完整的测量系统。它可以控制两个测试座和两个信号源,是一台测量精度高、自动化程度高、测量速度快、功能强大的测量仪器。
3630A是一频率转换器测试座,它是一四通道接收机,能够测量混频器、多端口器件、天线等的幅度和相位,其前面板的结构如图1所示。信号源的信号由RF IN端提供给3630A测试座,然后一分为二,一路由RF OUT输出,作为被测器件的测试信号;另一路由SOURCE LOCK OUTPUT输出,连接到RA或RB,作为锁相参考信号。
TA RA SOURCE LOCK OUTPUT RB TB RF OUT RF IN
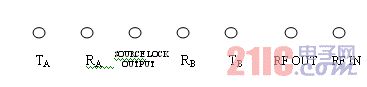
图1 3630A前面板示意图
三、 射频仿真系统对测量的技术要求
在阵列式射频仿真系统中,天线阵列及其馈电系统的校准是一项非常重要的工作。校准与通常的微波器件的幅度和相位的测量本质上是一致的,但它有自身的特点:⑴信号源放置在远离矢量网络分析仪的地方,甚至不在同一实验室;⑵被测信号需经过下变频后送入矢量网络分析仪;⑶要求有较高的相对幅度和相对相位测量精度;⑷要求有较高的幅度和相位稳定性;⑸测量两路信号间的幅度和相位。因此,选择矢量网络分析仪作为幅相测量设备,并辅以必要的外围设备组成校准测试系统,是最佳选择。关键是DUT所要求的测量信号的频率,与矢量网络分析仪的测试频率不同。
四、 测试系统的组成
选择3630A作为天线阵列及其馈电系统校准时的测试座,整个系统的组成原理如图2所示。
滤波放大 混频
本振 馈电系统 信号源
滤波放大 混频
TA RA SOURCE LOCK OUTPUT RB TB RF OUT RF IN
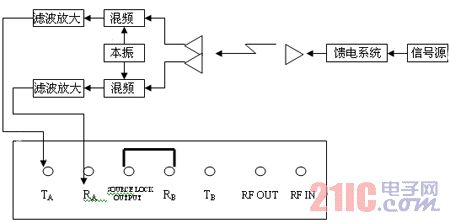
图2 测试系统原理框图
信号源输出频率为f1的信号,经天线阵列馈电系统后由天线辐射出去,两个接收天线的接收信号经混频变为频率为f2的信号,再经滤波放大后分别馈入3630A的TA、、RA端。
考虑到测量信号的频率与矢量网络分析仪的测试频率不同以及DUT的距离较远,测试信号由一台单独的频综提供,位于DUT附近。为了保证整个测试系统的相参性,Wiltron360B、信号源、本振用同一个10MHz信号作为参考信号。
五、 矢量网络分析仪的设置
将ROURCE LOCK OUTPUT端与RB端直接相连。将Wiltron360B的测试座设置为3630A,测试频率设置为f2。由于本系统只是测试TA/RA,而S11就是定义为TA/RA,因此将Wiltron360B设置为单通道显示(SINGLE CHANNEL),并将通道1激活(CH1),至此,主要的设置完成,可以进行测试。
为了测试过程的自动化,由计算机通过GPIB接口实现对矢量网络分析仪Wiltron360B的遥控,Wiltron360B的所有设置和测试数据的读取都是由计算机自动完成的。
六、 结束语
本测试系统所关注的不是DUT本身的插入损耗和插入相移,而是关注当DUT的状态发生变化时,其插入损耗和插入相移的变化量,是一种相对测量。按照上述方案所组成的校准系统能够满足所需要的较高的技术指标要求,并一直应用在射频仿真试验中。





