・上一文章:基于DDS芯片的相位相关双通道信号源设计
・下一文章:基于安培力的金属与非金属自动分离垃圾箱
(5)将边界行列像素点方向全部置为方向0。
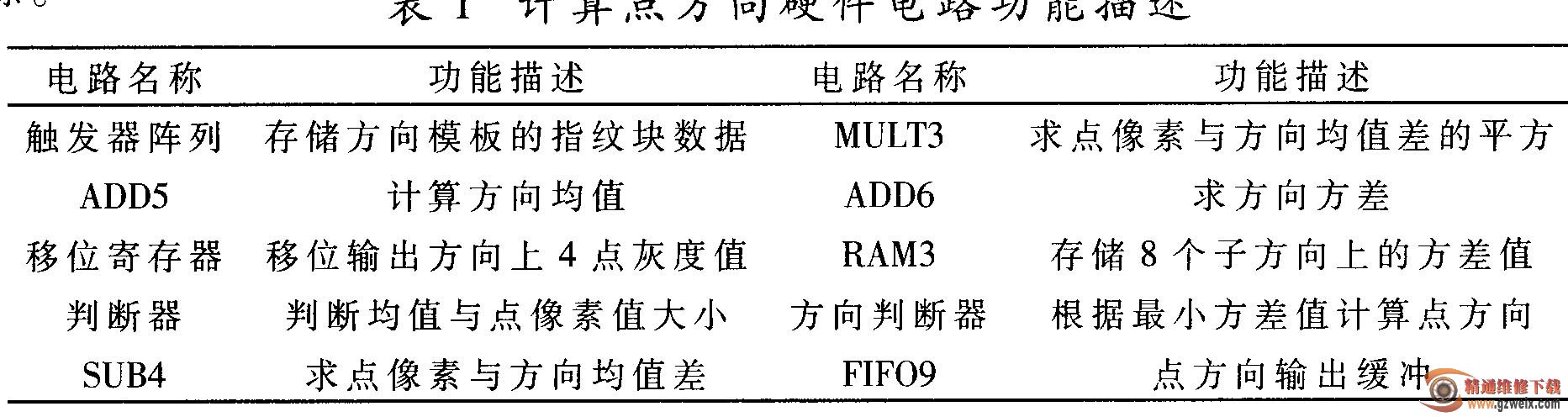
考虑到指纹图像纹理结构的特点:脊线(或谷线)点沿着脊线(或谷线)方向灰度值相近,而沿着非脊线(或非谷线)方向上灰度值相差较大,因而像素点在脊线(或谷线)方向的方差最小。因此,本文采用基于方向模板的最小方差法来计算点方向。其硬件电路框图如图2所示,其中各部件的功能如表1所述。

1.2块方向计算、滤波与增强电路设计
将求得的指纹点方向图按8x8分割,计算块方向规则为:统计8x8块中各方向的直方图,块方向为直方图的峰值方向;计算完成后进行块方向滤波,滤波方案为基于3x3滤波模板的直方图统计,更新块方向为直方图的峰值方向。
方向滤波器的构造原则为:
(1)滤波器模板尺寸要合适,模板过小则难以达到去噪、清晰纹理效果,过大则可能会破坏曲率较大的纹线结构。本文采用7x7大小的模板;
(2)模板边长为奇数,模板相对中心点对称;
(3)为提高脊线与谷线之间灰度反差、达到边缘锐化效果,在垂直于纹线方向,中央部分系数为正,两边系数为负数;
(4)滤波结果与原图的平均灰度无关,模板系数代数和为0。
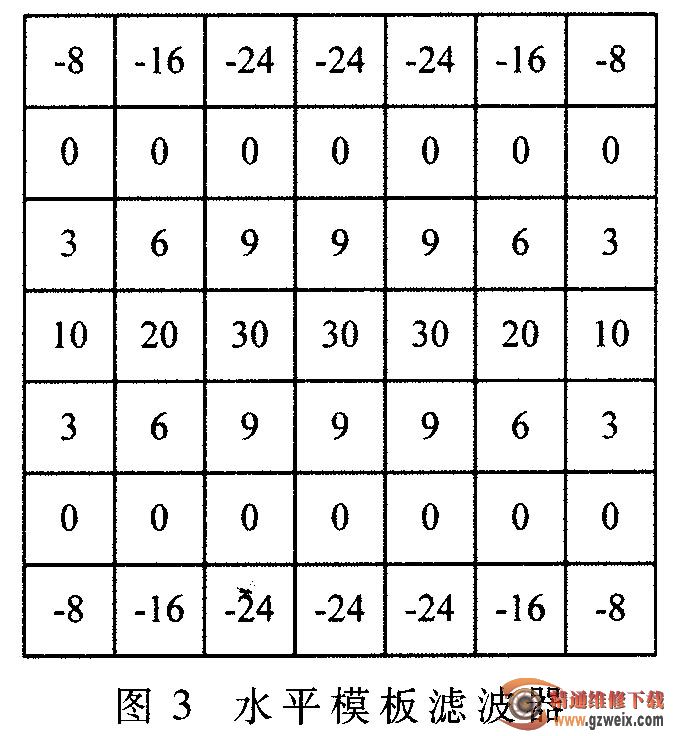
按照上述原则设计的水平模板如图3所示,其他方向模板系数求解的具体实现方法可以参考文献。方向滤波增强算法的实现过程为:首先计算像素点(或像素块)的方向,然后再进行像素块与模板系数卷积运算,以完成点像素的增强。由参考文献可知,其他方向模板系数的求解公式有正弦、余弦参数,其算法复杂,且在线计算一次模板系数就要计算294个系数,不仅费时,而且占用大量资源。因此,本文提出一种基于查表结构的算法,将8个方向的模板系数全部在线下计算得出并存储在电路内部,以供方向查表调用;并将增强后的像素点直接二值化处理,以简化指纹预处理步骤,减少计算时间,节约硬件资源。
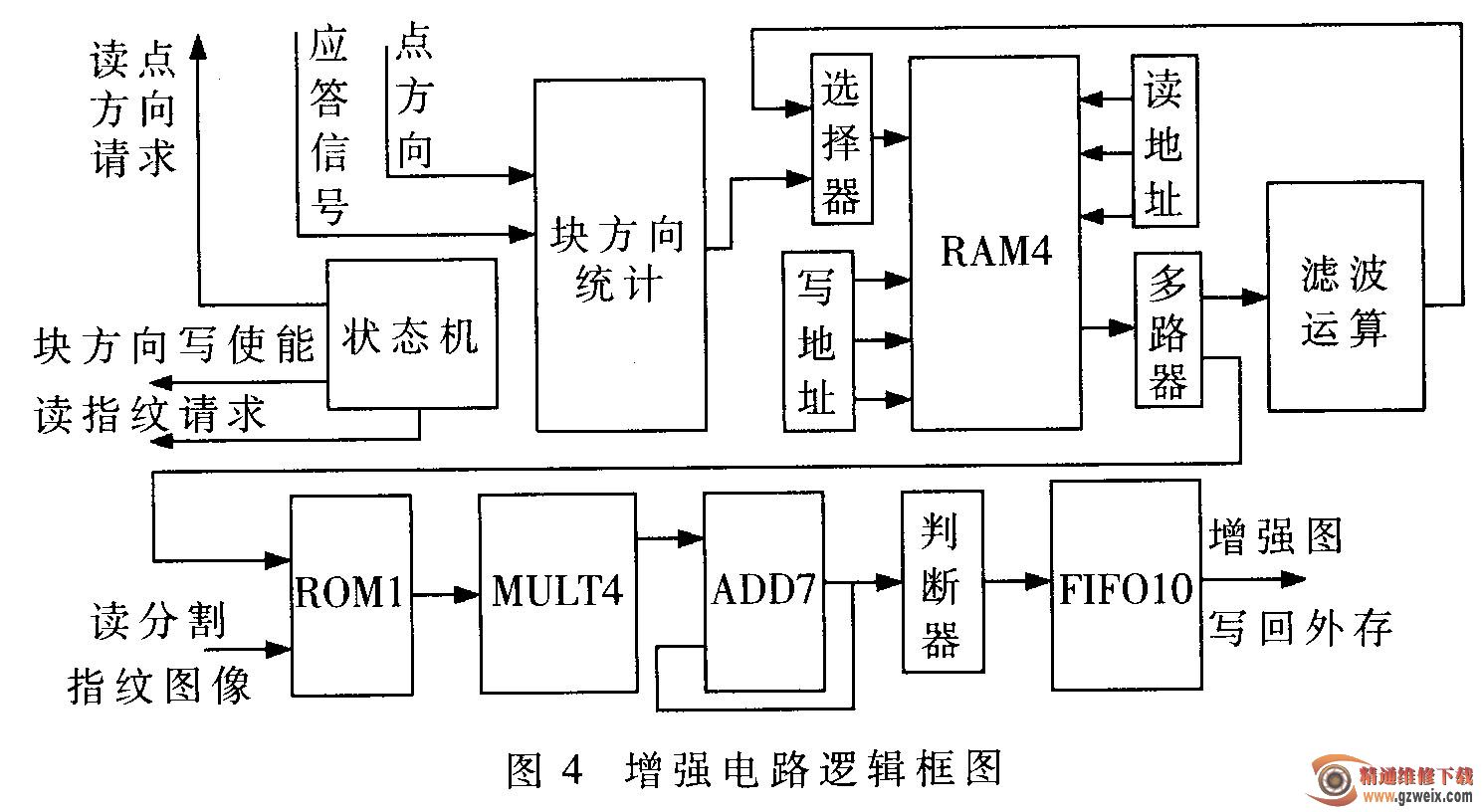
图4所示为硬件电路框图。其中,RAM4为块方向存储器,块方向统计完成8x8直方图统计,选择器确定写块方向模式,写地址计算块方向写地址,读地址计算块方向读地址,多路器选择增强、滤波模式,滤波运算实现3x3直方图统计,ROM1为模板系数查找表,MULT4与ADD7实现增强卷积运算,判断器将增强后的像素值二值化,FIFO10为数据输出缓冲。





