・上一文章:基于DDS芯片的相位相关双通道信号源设计
・下一文章:基于安培力的金属与非金属自动分离垃圾箱
摘要:增强运算是指纹预处理中的关键步骤,在以往算法的基础上加以改进,设计了一种基于查表结构的硬件电路,提高了运算速度,同时节约了硬件资源。用Verilog硬件描述语言对电路进行RTL (Register Transistor Level)建模,并编写测试模型对电路进行仿真。通过测试结果可知,电路运算速度快,是等条件下通用处理器运算速度的10倍以上;增强后为二值化指纹图,减少了预处理的步骤与时间;其优越的增强效果,保证了后续的指纹特征提取与识别的正确率。该增强电路可作为IP核应用在指纹识别集成电路中。
指纹识别技术是当今最流行、最方便、最可靠的个人身份认证技术之一。指纹增强是指纹预处理过程中的核心算法,其目的有:消除图像中的噪声,增加指纹图像中的脊线与谷线的对比度,对指纹断点进行修复,对可修复模糊区域进行恢复,提高后续指纹特征点的提取以及指纹比对的正确率。因此,一个高效的指纹增强算法对指纹识别系统起着至关重要的作用。
目前,常用的指纹增强算法有:Lin Hong等人提出利用块方向的Gabor滤波器增强指纹图像,该算法不仅要计算指纹图像的方向图,还要计算脊线的频率方向,故算法复杂、费时,且准确地计算脊线方向也是一个难点;O ' Gorman提出方向滤波器,通过计算出指纹图像的方向图,依据方向值选择相应的滤波模板对像素点增强,其算法相对简单,处理速度快,增强效果显著。本文在后者的基础上加以改进,构造一种查表结构的硬件电路,节约了硬件资源,且比传统的处理算法至少快10倍。
1电路结构与设计
1.1点方向计算电路设计
基于方向图滤波的指纹增强要先算出指纹图像的方向图,最常用的有基于Sobel梯度算子的算法和基于点方向模板的算法。其中,梯度算法含加、减、乘、除、反正切运算,算法相对复杂,同时电路在实现除法、反正切运算时比较费时且消耗大量硬件资源。
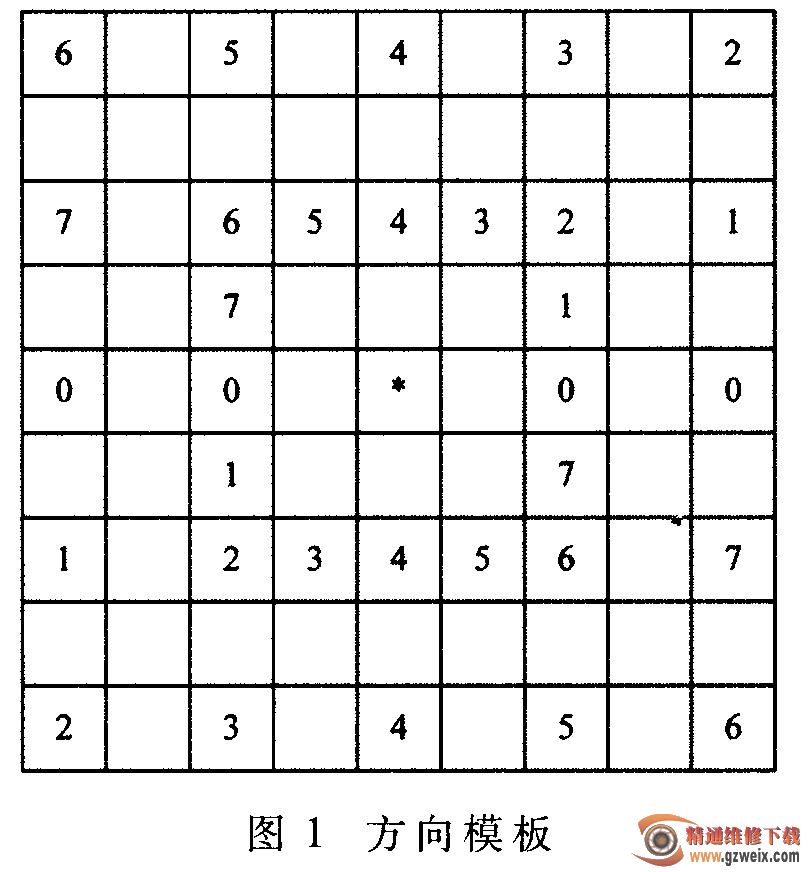
图1所示为求像素点的方向模板。将中心像素点(以*表示)周边划分为8个方向,其中:0-7分别代表0°、22 .5°、45°、67 .5°、90°、112.5°、135°、157.5°方向,则具体的点方向计算步骤为:
(1)求出方向模板中的每个方向上的4个像素点灰度值的平均值M。
(2)将8个方向按照两两垂直的方向分成4组(0&4、1&5、2&6,、3&7),并计算每组均值DMi,即:

取DMi中值最大一组中的两个方向j或j +4,j为当前点方向,jЕi。
(3)按照式(3)求出当前像素点*的脊线方向:

其中,M*代表像素点*的灰度值,D*代表该点的方向符号。
(4)按照步骤(1)-(3)将方向模板从左到右、从上到下遍布整个指纹图像。





