・上一文章:以智能型混合信号FPGA开发真正符合需求的系统
・下一文章:基于STCl2C5410AD的电动车无刷电机控制器检测
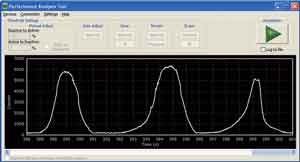
图2 单一LED系统性能分析
二维空间检测由位于不同位置的两个LED和单个光电二极管组成。从LED1得到一个测量值,然后快速从LED2获得另一个测量值,两个测量值被用于计算二维空间上的物体位置。其中,一维空间是接近LED1(左)或接近LED2(右),而另一维空间是接近或远离光电二极管。图3是与图2相同的三个方向运动检测结果。其中,白线代表从LED1中读出的数据,红线代表从LED2读出的数据。从左到右滑动过程中,白线上升,然后是红线。当手从左到右滑动时,LED1反射IR光到传感器,然后是LED2。
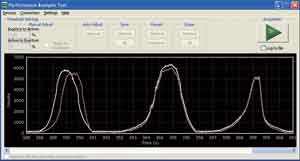
图3 二维空间中手势性能分析
三维空间运动检测由三个LED和单个光电二极管组成,LED3与LED1、LED2不在同一直线上,可以把LED1和LED2之间的连线看作X轴,LED1和LED3之间的连线看作Y轴,从光电二极管和LED到被测物体之间的连线看作Z轴。图4显示了与图2和图3相同的测量过程,其中,蓝线代表LED3的测量数据。当手从左向右滑动时,因为手在LED1和LED3上同时通过,LED1和LED3数据线同时上升,然后是LED2数据线。当手从底部向顶部滑动时,因为手先遇到来自LED3的IR光,LED3数据线上升,然后是LED1和LED2。当往复运动时,因为手在整个过程中都反射等量的LED光,三个LED测量值是相同的。
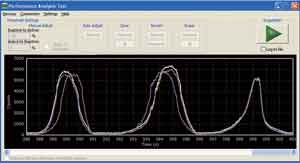
图4 加入LED3后的三维空间中动作性能分析
当IR LED和IR传感器应用于产品时,这些组件通常不会用作装饰目的而放在外面,终端产品至少需要一个开口或透明窗口,让IR光透过。
IR LED从窗口中照射出,被外部物体反射后,通过窗口进入Si1120传感器。单一窗口配置的主要缺点是:窗口将导致一些光线被内反射到Si1120,即使在检测范围内没有外部物体时,大量反射光也可能导致传感器输出。
双窗口设计使用其中一个窗口用于IR LED,另一个窗口用于传感器。通过在LED和传感器之间进行适当的隔离,设计消除了内部反射的问题,为系统提供更好的敏感性和检测范围。
对于IR接近感应系统设计而言,选择何种IR LED是一项非常重要的决定。IR LED视角对最大检测距离和范围有很大影响。从LED射出的IR光形成一个圆锥状,圆锥顶角(大多数LED能量从这里输出)被称为LED视角。
所有的LED都有一个特定的视角,一个窄视角LED意味着发出的能量更加集中,比宽视角LED照射的更远。这意味着使用窄视角IR LED将在窄检测区域中形成更远的检测范围,图5说明了窄视角和宽视角IR LED的差异。
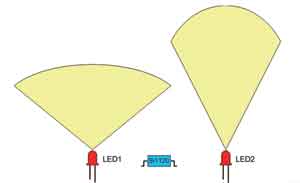
图5 窄视角和宽视角IR LED的差异
当设计IR系统时,系统中被测物体的特点也是需要重点考虑的。除了用于检测手势外,IR接近感应系统也能被用于检测无生命物体,如车库门(打开或关闭)。检测较大物体时,由于有更多的IR光被反射,检测距离将更远。物体的颜色是另一个需要考虑的因素,因为IR光与可见光有相同特性,浅色物体比深色物体反射更多光线。物体的颜色越深,越要接近IR系统,因为仅有来自IR LED的少量IR光被反射到IR传感器。





