视频会议模式的设置和参与会议的成员管理可由MCU控制台来完成。实际应用中,一般会为每个会议配备一个会议管理者,又称会议管理员。会议管理员可通过MCU控制台对多点控制单元进行远程控制,包括设置会议开始和结束的时间、会议采用的音视频标准、会议模式的设置、与会者列表的管理以及会议模板的装载和保存等。在会议进行中,会议管理员还可通过MCU控制台对会议进行调度,包括指定新的主席、指定新的发言听众、取消发言等。
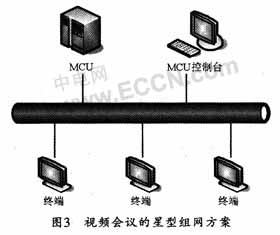
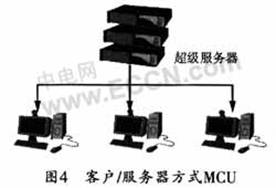
在分布式会议方案中,各个终端均完成一定的控制与交换功能,因而灵活性强,与会端加入/退出会议功能易于实现,但其通信协议比较复杂。控制信息以广播方式发送,因而通信效率比较低,所以通常采用集中式实现方案。有时候,主席端也可与MCU合并形成一个超级服务端。这种方式可以演化为人们所熟悉的客户/服务器体系。在主席端的机动性要求不高时,这种方式具有非常突出的优点,如易于实现,控制简便等。图4所示是客户/服务器方式MCU的方案结构。为了保证通用性和机动性,本设计采用集中式MCU方案。
2.2 MCU的通信接口设计
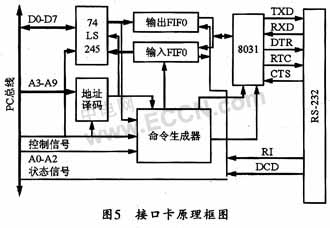
通信接口的主要功能是数据串/并变换与缓存,其作用类似于较大输入输出缓冲区的串口扩展。从调制解调器(Modem)输入的串行数据格式为2-8-1-N,即2 bit起始位,8 bit数据,1bit停止位,无奇偶校验。接口卡分离出8 bit数据位并对之进行串/并变换后存入输入缓冲区,缓冲区是8 kbit的FIFO(先入先出)堆栈,接口卡提供指定的地址以便微机从中读取数据。微机输出的数据可写入接口卡的输出缓冲区。它也是8 kbit的FIFO堆栈,然后接口卡执行相反的操作并将之输出到Modem[17]。接口卡的原理如图5所示。
2.3 视频会议系统协议的简化模型
MCU的设计可参考ITU的H.324系列建议。该建议拟订了低比特多媒体通信终端的基本框架。它包括四个主要部分:G.723.1音频编码标准、H.263视频编码标准、H.245通信控制协议和H.223复接分接协议,该建议同时也描述了一个在PSTN中采用V.34标准的Modem。V.34标准规定了输入/输出Modem的数据格式、比特率等要求。本系统由于MCU连接了多个端口,若各端口Modem的速率不一致,则可能会造成MCU的数据拥塞,故本系统中禁止Modem速率的自动调整。一般在会议开始之前,即按各端口中最低速率建立连接,以保证较小的误码率。在MCU中,主要是对H.223帧的帧头进行处理。H.223帧结构中的帧起始标志为3个连续的FAS码,每个FAS码长为4个字节,试验系统中可取为0XEC。该标志也可用于实现对H.223帧的定界。由于帧长度是不定的,因此,帧起始标志的正确传输与检测直接影响到帧定位。控制信号也占4个字节,其中前两个字节为BAS码,主要携带会议控制信息。因本会议系统的可能状态较少,所用到的控制命令也少,故只用一个字节传送命令,另一个字节作为BAS码的纠错字节,以保证命令的正确传输。
在视频会议系统的命令交互中,MCU及各个与会站点在会议中都要维护一张状态设置表,表中记录了各与会站点所对应的逻辑端口、电话号码、地理位置、在会议中的身份(主席、发言方及普通会员)等,此后MCU进一步将逻辑端口映射成相应的物理地址,以便MCU从该地址读写信息。状态设置表的初始设置是在会前通过勤务电话确定的。预定的开会时间由MCU负责通过Modem呼通各与会站点,以建立起数据链路。当某个站点呼通后,该站点即在其H.223帧中插入终端就绪命令,而MCU则将该帧环回,并将BAS码替换为就绪确认命令。当所有站点均就绪后,MCU即向各站点发会议就绪命令。同时将主席端的数据切换到各个站点,此时主席便可以发言,也可以命令其它会员发言。如果主席没有发命令给MCU,则向MCU发会议进行中状态指示,MCU则维持当前状态;若主席命令A站点发言,则其在H.223帧中插入令A发言的命令。MCU接到命令后,即将A站点的数据切换到除A外的所有其它站点,同时将主席的数据发往A站点。当主席命令会议结束时,MCU即向各站点发送会议结束确认命令,并停止工作,由各站点自行挂断Modem。图6为上述过程的命令交互示意图。
上一页 [1] [2] [3]





