・上一文章:注塑机伺服电机节能问题
・下一文章:高压软起动在压缩机负载上的设计应用
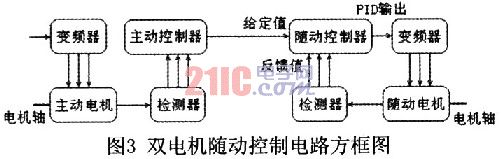
2.3 多电机随动控制系统结构及原理
在多电机驱动系统中,每台电机都设有专用的单片机随动控制器、角度/转速传感器、变频驱动器和伺服驱动电机,各自都构成有转速反馈的闭环控制系统。其主动电机数据作为给定值是具有群控引领作用的数据,各单片机与主控制器之间采用串口通信或I2C总线连接,构成集散式控制系统,各单片机随动控制器一方面接收主控制器发送的转速给定值,同时接收转速传感器检测的本机转速值,同样应用最少拍控制算法以提高响应的实时性并消除静差,或应用PID控制算法减小过调量并消除静差,使众多随动电机转速与给定值转速之间真正实现并行同步。由于采用串口通信,主控制器可以向各随动控制器发送相同的给定值,也可根据需要发送不同的给定值,实现转速的同步、异步和特殊控制要求。
2.4 单片机集散式控制系统特点
单片机集散式控制系统具有操作和管理集中、多机现场控制、线路连接简便、主机还可扩展上位机的USB接口和互联网络接口,为进一步扩展工程应用范围,运行更复杂的程序,实现更多样的控制功能奠定基础。由此可知,凡是需要集群多工位电机并行的群控随动控制系统,都适用以单片机集散式控制构建控制系统,本文的意义就在于设计构建结构简单、性价比高、性能稳定、可并行工作的群控随动控制系统。(集散式控制方框图、远程串行接口电路详见《电子技术》2009,12期《多微机联控在大型三面翻广告设备中的应用》一文)
3 随动控制系统中电机转子位置、转速、转向的检测
实现多电机同步随动的关键之一是转予位置、转速、转向的检测,可选的检测方案有多种,这里介绍使用自整角机的检测方法。检测值经A/D转换后的数据送单片机作进一步的程序分析。(模数转换电路详见《电子技术》2009,12期《多微机联控在大型三面翻广告设备中的应用》一文)
3.1 电机转子位置的检测
由自整角机原理可知,发送方通电转子的电压有效值一定时,其交变磁场在定子三相绕组中的感生电势因位置的不同其电压有效值就不同,对三相电势有效值的检测和分析即可获取转子静态和动态的位置信息。

3.2 电机转速的检测
自整角机三相定子绕组中任一相感生电势有效值的大小变化速率,正比于转子位置的变化速率。若转子静止不动,则定子感生电势大小不变;反之定子电压有效值变化越快,说明转子位置变化越快。对电压有效值变化速率的检测和分析,即可获得被测电机转子的转速。(参看图5自整角变压器)
3.3 电机转子转向的检测
由于转子静止时,必有某相感生电势有效值较大,另两相较小。根据三相定子绕组空间分布情况,设ABC三相在某时刻为B相电势有效值较大,A、C两相电势有效值较小,则下一时刻若A相电势减小、C相电势增大,说明转子在顺时针旋转;反之若A相电压增大、C相电压减小,说明转子作逆时针旋转。
3.4 系统中主动电机的选择
自整角机可以用来检测主动电机转子位置、转速、转向等数据,也可用来检测随动电机转子位置、转速、转向等数据,在双电机驱动中,只要两电机的机电常数相同,飞轮转矩相同,则主动与随动可以较方便地切换;在多电机随动中,主动电机只能有一个,通常选择在控制系统中具有主导作用或引领作用的电机为主动电机。
例如:在由雷达天线主导的自动高炮群随动控制系统中,雷达天线的驱动电机作为主动电机;在群控太阳能采集板控制系统中,具有光线方向采集与识别的太阳能采集板驱动电机作为主动电机。

4 最少拍控制与PID控制的特点
4.1 最少拍控制算法的特点
在结构最优化的最少拍控制系统中,一个采样周期称为一拍,对特定给定的输入量,能在最少采样周期数内使系统输出量达到无静差的稳定状态,所以又称为最少拍控制或时间最优控制。
设特定的输入量为r(k),系统输出为c(k),被控对象的传递函数为G(Z),数字控制器的控制算法为D(Z),控制偏差为E(z);当G(Z)D(z)=1时,c(k)能即时准确跟踪r(k)必须满足的条件有两个,即:a.G(Z)稳定;b.D(Z)可实现。
所以其特点是:
(1)对特定的r(k),当ess=lim[r(k)-c(k)]=O时,系统输出无静差;
(2)且c(k)准确跟踪r(k)所需的采样周期数为最少;
(3)控制系统稳定;
(4)控制算法D(Z)可实现。





