摘 要:高压大功率电机在起动时对负载和电网都有比较大的影响。晶闸管串联式高压软起动器以其优越的起动性能和其他一些优点而广泛使用。本文通过高压软起动器在现场大功率压缩机负载上的应用,分析其工作原理,介绍了起动功能,对晶闸管串联方式的高压软起动做了比较全面的介绍。
关键词:晶闸管、电动机、触发、软起动
1. 引言
交流异步电动机以其构造简单、极高的运行可靠性、极强的环境适应能力和优异的拖动性能在我国煤矿、石油、化工、钢铁、发电、供水、水泥建材等领域获得了广泛的应用。但是交流异步电动机致命的缺点是起动冲击大,会对系统造成不利的影响。主要影响体现在两个方面:
(1)电气方面的问题:
起动时可达5-7倍的额定电流,造成电动机绕组因电流引起过温,从而加速其绝缘老化,造成供电网电压波动,影响同电网下其他设备的正常运行。
(2)机械方面的问题:
过大的起动转矩产生机械冲击,对被带动的设备造成大的冲击力,缩短使用寿命,影响精确度。如使连轴器损坏、皮带撕裂等。造成机械传动部件的非正常磨损及冲击,加速老化,缩短寿命从而增加维护工作量。
在首钢冷轧厂制氮生产线空压机上就遇到了这样的问题,由于电机功率比较大(10KV/3730KW和10KV/2250KW),首先在起动过程中对电机及压缩机的机械冲击比较大,给系统维护增加了工作量;其次电机在直接起动时电网跌落比较严重,在电网压降达到85%时其他设备就不能正常工作。鉴于以上原因决定使用PowerEasy型晶闸管式软起动装置。
2. 晶闸管串联高压软起动的构成及原理
2.1 主回路构成
晶闸管串联软起动装置是结合了电力电子技术、光电技术控制技术及微处理技术而设计全数字智能化的起动设备。晶闸管串联软起动主回路接线图如图1所示,主要由高压可控硅串联阀组和旁路接触器组成,其中高压可控硅串联阀组是功率变换执行部件,由多只可控硅串并联组成,并辅以吸收、均压箝位电路,保证其在高压环境中的可靠性。当进线端得电后,通过控制可控硅的导通角以实现对交流三相电源进行斩波,控制输出电压的幅值。并在起动过程完成后将旁路接触器闭合,软起动装置切换到旁路状态,同时关闭晶闸管。

图1 晶闸管串联软起动主回路接线图
2.2 控制电路
如图2所示,晶闸管串联高压软起动装置的控制电路一般由主控电路、触发装置、信号采集电路和人机界面组成。
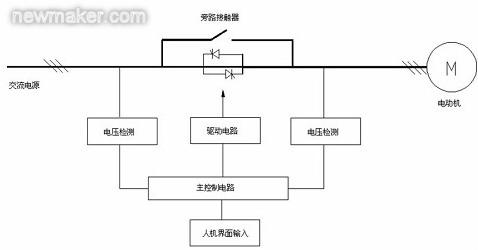
图2 软起动控制框图
2.2.1 主控电路
主控电路的主要由DSP微处理器及CPLD大规模门阵列组成的数字电路组成,它的主要功能是产生触发晶闸管的脉冲指令,晶闸管的触发命令通过数字信号处理器(DSP)来发出。主控电路可以根据信号采集电路采集的电压与电流信号来调整晶闸管的导通角,从而达到调整电机电流的作用,实现对电机的闭环控制,即限流起动。在发出触发脉冲的同时它又可以通过电压电流温度等的反馈信号监视电机及软起动装置本身的运行状态,保护整个系统,确保系统的安全运行。
2.2.2触发系统
触发系统是系统稳定可靠的关键部分,必须具有抗噪声干扰的能力,能够及时准确的导通可控硅。在这里主要存在两个技术问题:
1.触发脉冲能够及时准确的触发晶闸管
晶闸管是一种电流控制型双极型半导体元件,它要求门极的驱动单元类似于一个电流源,能向晶闸管提供一个特别陡直的尖峰电流脉冲,来保证在任何时刻都能够准确可靠的触发晶闸管。所以晶闸管的门极触发脉冲特性对晶闸管的正常工作有非常强烈的影响。
在晶闸管串联使用时,我们要求相互串联的晶闸管尽可能的一起导通,因为开通较慢的可能会承受过电压而损坏元件,这个时候就要求同组串联的晶闸管开通时间差尽量的小。
晶闸管的开通速度主要和门极触发脉冲的幅值以及脉冲上升沿的陡度有关系。也就是说门极触发脉冲的幅值越大,脉冲上升沿越陡,晶闸管开通的时间就越短。所以在电机软起动领域,绝大多数厂家都是采用强触发方式来触发晶闸管。即触发脉冲IG的电流幅值大于或等于10IGT,脉冲上升沿时间tr≤1μs。总之。为了保证晶闸管阀串工作的可靠性,IG要远远大于IGT。
2.触发晶闸管的触发方式
高压隔离有三种触发系统,脉冲变压器、直接光触发和光纤触发。脉冲变压器结构简单、成本低,但是其电磁兼容性差,不适合在高压环境下使用;直接光触发系统虽然可靠准确但是价格昂贵,很少被采用;光纤触发系统可靠性好,虽然相比直接光触发系统在电路上增加了一些复杂性,但是相对造价要低很多并且触发准确可靠,所以在高压应用上是首选,目前市场上的高压软起动装置的触发系统基本上都采用光纤触发系统。
在高压软起动中触发系统的工作电源一般采取高位取能获得,即触发电路板上的工作电源由动态均压(即RC吸收回路)上的电容供应,这样既避免使用高耐压变压器所带来的高成本,又实现了电气隔离,避免触发信号受到干扰。需要指出的是,高位取能这种方法仅在软起动过程中适用,而在针对一些泵类负载设计的软停车过程中,由于在停止过程的后半段由于主回路中的电流越来越小,会影响到触发板上电能的获取,从而影响到对晶闸管的触发。所以一些厂家的晶闸管软起动装置在生产具有软停车功能的产品时会单独给触发系统额外提供电源,这样就增加了成本。而AB等一些国外公司的软起动装置在这方面技术就比较完善,他们采用了一种叫做低位取能的一种技术,即在低压侧采用一个低压大功率的变压器,在触发板上采用一套电流感应装置,把变压器的线穿过触发板上的电流感应装置,在触发电路板上获得感应电流,来充当电源的作用,这样在软停车的后期触发板可以获取足够的功率来继续触发晶闸管,可以使软停车的后期停车过程更加平稳,减少泵类负载的水锤效应对管道和叶轮的冲击。
2.2.3信号采集电路和人机界面
信号采集电路主要功能是采集各种信号并进行预处理,然后把处理过的信号反馈回主控电路。目前主要采集信号有两种,电压信号和电流信号,部分软起动厂家还采集温度及转速信号。电压、电流信号一般通过互感器来进行采集,在经过处理后反馈回主控制电路,根据反馈的数据判断电机及软起动装置的运行状态,发出触发脉冲或者在系统整体运行异常时通过反馈信号判断故障并发出保护命令。
人机界面电路一般有液晶屏和键盘组成,用来完成用户的参数设置、选择起动模式以及显示系统的运行状态。在某些需要远程控制的工况下,部分软起动装置还加装了远程通讯模块。
[1] [2] [3] 下一页





