・上一文章:TCP/IP协议及发展和IP视频传输特点
・下一文章:隔离开关电源同步整流器数字控制与驱动技术
0 引言
近年来,随着经济的不断增长,城市化、汽车化的急速发展,城市道路增长的有限与车辆增加的无限造成了严重的交通拥挤问题,其中以交叉口的交通拥堵问题最为严重。据数据显示,每年因交通堵塞造成的经济损失高达几十亿美元,现已成为制约经济发展和城市建设的瓶颈。可见,交通拥堵现状亟待解决。而有效地利用当前交通信号控制系统的作用,寻找一种更适用于实际情况的交通信号控制方案又是解决该问题的主要途径。因此,本文的研究就显得意义重大。 当前存在的交通信号控制方案主要有定时控制、感应控制、基于数学模型的自适应控制和模糊控制等。其中当前存在的两级模糊控制方案是目前控制效果相对较优的一种,可以较好地实现对交叉口交通信号灯的实时控制。但它仍存在许多问题,其中一个最大的不足在于它不能准确地显示出红、绿灯相位的时间,没能与能降低闯红灯率和交通事故率,且具有人性化特征的信号系统显时装置结合运用,这也是其不易运用到实际情况的症结所在;另外,有些两级模糊控制在第一级控制模块中,其采取的输入变量只考虑了相位排队长度和车流到达率,而没有考虑各相位车辆等待时间。此时若一个相位的车辆一段时间内一直都很少,那照该控制方案就只能让其一直等待,这必将造成其控制的不合理。
基于此,本文针对当前控制效果相对较好的模糊控制的不足之处,同时结合对当前各种常用交叉口交通信号控制方案的全面对比与深入分析,沿用了各种控制方案的优点,完善和弥补其不足之处,最终设计出了一种更适用于实际情况的新型两级模糊控制方案。该新方案对随机交通流的适应性强,弥补了定时控制的缺点;同时,综合考虑了绿灯相位和红灯相位,且对相位繁忙优先性进行了考虑,弥补了感应控制的缺陷;另外,对模糊器进行了优化,同时与当前运用成熟的定时控制的信号系统显时装置进行了有机结合,充分发挥了信号系统显时装置的优点,利用了可视化的时间来降低闯红灯率和交通事故率,使其更具人性化,对交通现场的适用性更强。
1 交叉口交通平面几何设计设计与相位设计
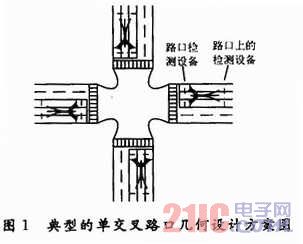
通过对当前城市交叉口交通平面几何设计和相位设计的具体情况进行深入调研并参考了大量文献后,确定出当前相对最优的一种交叉口交通平面几何设计方案如图1所示。交叉路口分东、南、西、北四个通行方向,每个通行方向均有左转、直行和右转三股车流。
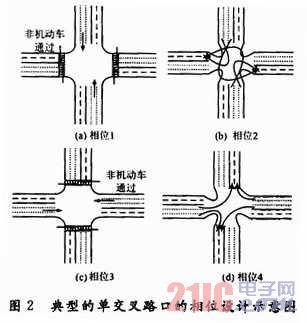
针对当前存在的各种相位设计方案,从其交叉口利用率、安全性、人性化和实用性等方面综合分析对比后,确定出当前相对最优的相位设计方案如图2所示,即南北直行、南北左右转、东西直行和东西左右转,行人和非机动车可以在第1相位和第3相位开通时顺利通行。本文将以此为研究对象。
2 交通信号新型两级模糊控制思想
新型两级模糊控制方案的整体控制图如图3所示,先通过车辆检测器检测出当前所有处于红灯相位的等待车辆数和各车流方向自上次绿灯以来的红灯持续时间,然后将检测出来的交通流数据传送到新型两级模糊控制器。
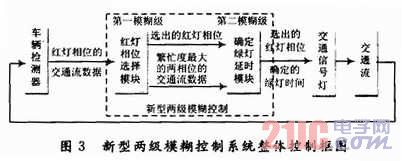
第一模糊控制级接收到车辆检测器检测出的红灯相位等待车辆数和红灯持续时间后,经过该模糊控制级处理推出当前各红灯相位的繁忙度,从而可以确定出在当前绿灯相位跳转前一瞬间下一个该亮绿灯的等待相位。同时,找出繁忙度最大的2个相位,并返回去得到这繁忙度最大的2个相位的交通流数据(即这两相位的相位等待车辆数)。
第二模糊控制级通过对繁忙度最大的两个相位的交通流数据处理后,推出下一个绿灯等待相位的绿灯时间,并将该绿灯时间传到交通显时信号灯上。当等到上一绿灯相位亮完绿灯后立即让第一级模糊控制选出的绿灯等待相位显示绿灯,同时使其显示绿灯时间,其显示时间即为第二级模糊控制确定出的绿灯时间。这样周而复始的运行,即可很好地对交通流进行实时智能控制了。
另外,还充分考虑到在实际交通信号控制中,控制方案应人性化且适用性强。对此,对其红绿灯显时控制系统做了如下规定:显示绿灯的相位显示准确的绿灯运行时间;对于红灯相位,只对下一个绿灯相位就是它的红灯相位显示时间,且只在当前绿灯相位绿灯时间即将结束前瞬间(假定5 s),使其显示准确的红灯倒计时间。显示了红灯时间的相位即表示下一相位该它通行,而其他不显时间的红灯相位,表示需要多等待,下一相位不是它。这样充分发挥了现有显时交通信号装置的优势,更易遵守,更具人性化,更适用于实际交通情况。
3 新型两级模糊器的设计
3.1 第一级模糊控制器的设计
该模糊级为红灯相位选择模块,该模块为双输入单输出模糊控制,其两个输入为:当前处于红灯相位的等待(排队)车辆数(qr)和各车流方向自上次绿灯以来的红灯持续时间(tr),输出为各红灯相位的繁忙度(Ur)。
qr的基本论域为[0,30],离散论域为{1,2,3,4,5,6,7,8,9,10,11,12,13,14},在离散论域上定义5个模糊子集{很短、短、中等、长、很长};





