・上一文章:某光电跟踪仪锁定机构检测调试仪的研制
・下一文章:基于瑞萨微控制器的温度控制系统设计
摘要:针对行波型超声波电机的驱动控制特性,为方便电机调试,实现电机的转速或位置信号检测,检测电机首次启动时的环境温度,设计了一款基于LPC2124的驱动控制系统。采用传统的推挽电路实现功率放大,串联电感进行谐振匹配。运用LPC2124内置的脉宽调制器和A/D转换器,外加微调电阻,可实时调节PWM频率,从而方便电机的调试。霍尔传感器ATS642LSH结合固定在电机转子上的环形齿轮,检测电机转速或位置。采用LM75温度传感器,检测环境温度,给电机的首次启动提供一个参考温度。试验表明,系统能顺利检测环境温度,能稳定、可靠地驱动电机工作,同时检测电机的转速或位置信号。
关键词:超声波电机;驱动控制;PWM;ARM
超声波电机是利用压电陶瓷的逆压电效应获得旋转力矩的新型电机,具有体积小、结构紧凑、功率密度大、无电磁干扰、低速大转矩、响应快、自锁能力强等特点。由于超声波电机在结构原理、运行特性与传统电磁原理电机有着本质的差异,决定了其驱动控制技术与传统的电机也有很大的不同,这也使得超声波电机的驱动控制技术的优劣成为影响超声波电机性能的关键因素之一。根据行波型超声波电机的结构特点和运动机理,其驱动、控制电路系统的设计应满足如下要求:1)提供两相超声频段内(一般为20~100 kHz)具体一定幅值(峰-峰值150~1 000 V)的正交的正弦驱动电压;2)超声波电机具有容性负载特性,需要设计匹配电路,以实现功率匹配、滤波和谐振升压的功能;3)应具有调频、调压、调相等方法中的一种方式或混合方式进行调速控制;4)应具有闭环控制功能,以适应随工作过程中电机温度的升高而引起的电机谐振频率的漂移。本文介绍了一款基于LPC2124的超声波电机驱动控制系统,该系统使电机的调试工作更加方便快捷,可实现较复杂算法。
1 系统电路设计
1.1 系统方案
本驱动控制系统的电路框图如图1所示。
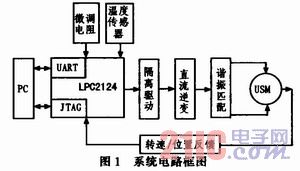
系统中LPC2124产生两路相位差为90°方波,两路方波经或非门后与原来的两路方波组成四路方波。四路方波经隔离驱动、直流逆变、谐振匹配后,就得到超声波电机工作所需的正弦交流信号。微调电阻主要用于电机调试时,调节输出PWM信号的频率,这可以缩短电机调试所消耗的时间。温度传感器用于检测电机所处的环境温度,这样,在对电机首次启动要求高的情况下,系统可以根据不同环境温度给电机提供不同的启动频率,有利于提高电机启动的稳定性。电机转子上的凹或凸齿对着霍尔传感器时,霍尔传感器输出的电流大小不一样。经过电路处理后,将电流变化转换成方波信号,利用方波信号实现电机转速、位置的检测。为了方便电路系统的调试和程序的下载,系统设置了JTAG和UART口。其中JTAG主要用于调试工作,当然也可以用于程序下载。而UART口则既可以将各种数据发送到电脑主机,又可用于程序的下载和Fl-ash的擦除。
1.2 控制芯片
超声波电机驱动控制系统的控制芯片是LPC2114,其内核为ARM7TDMI。LPC2124处理器是ARM通用32位微处理器家族的成员之一。LPC2124采用LQFP64封装,CPU操作电压1.8V,内部集成256 kB片内Flash程序存储区、16 kB静态RAM,拥有4路10位ADC、2个32位定时器、6路PWM输出、两个低功耗模式、46个GPIO及9个外部中断等。另外内置倍频锁相环(PLL),可实现最大为60 MHz的CPU操作率。同时LPC2124支持片上调试、断点,方便系统软、硬件的调试。
1.3 关键电路
1.3.1 隔离驱动、推挽、谐振匹配电路
隔离驱动、推挽、谐振匹配电路如图2所示。
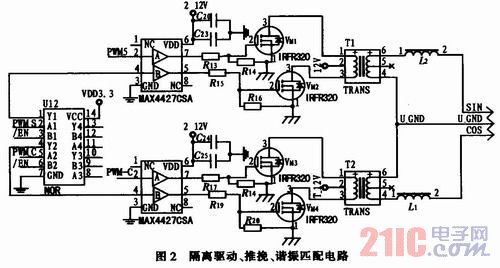
LPC2124产生两路相位差为90°方波PWM—S和PWM—C,两路方波分别经74HC02D或非门后形成两路相应的反相方波,与原来的两路方波组成相位依次相差90°四路方波。四路方波经MAX4427隔离驱动放大后,利用4个MOS管(IRFR320)与两个中间抽头的变压器组成的推挽电路,将四路方波信号转换成两路相位差为90°的交流方波信号。由于超声波电机工作需要的是正弦交流信号,且超声波电机属容性负载,所以用串联电感的方式进行谐振匹配。





