・上一文章:新型多功能智能小车的设计与应用
・下一文章:PIC16C72单片机的空调控制系统的研制
在对基于步进电机的运动控制系统设计进行优化的过程中,工程师必须综合考虑成本、性能、效率、未预料到的反馈难题(如机械共振)以及开发时间等因素。现代的电机控制系统面临着在多种不利环境中工作的难题,而传统解决方案的总效率通常受限于整个系统所遇到的最坏情况。自适应控制算法对于提取出经过优化的机电系统的最大效率而言是必不可少的。
系统映射
如果希望得到最高效率,就必须对整个机电系统的边界条件进行映射。所有的系统变量都必须考虑到:温度、机械降解、加速度、速度、电源电压等等。系统架构也会对其产生影响。
在开环系统中,通常需要以最坏情况下的电流驱动和速度曲线来激励电机,所以我们可以认为效率并不是这类系统的首要设计目标。这种类型的测试非常耗费时间,因为必须在电机可能使用的所有电源电压、温度和速度值下对系统进行验证,以尽量减小出现共振的风险。每个步进电机系统都存在发生共振的可能,这通常是因为工作在(或接近于)电机的自然频率而造成的。避开这些区域是至关重要的,因为共振可能会造成电机丢步或进入失速状态。不过,对于开环系统而言,确定这些区域可能是非常困难的。
闭环控制通常采用以下两种形式:基于传感器的系统(光或是霍尔效应)和无传感器的系统。无传感器的系统也称为“半闭环系统”,通常使用由电机线圈所产生的电压来作为反馈。基于传感器的控制系统使用得很广泛,但是在映射实践中必须考虑传感器的其他变化。无传感器的系统的一项主要优势在于,它只需要读取与电机的物理运动有关的信息。它的另一项重要的优势是降低了闭环或半闭环系统的系统成本,同时,由于不需要外部传感器,也降低了系统的复杂度。成功的设计需要理解反电动势的特性。
SLA映射
反电动势可以方便地提取出与机电系统的运动有关的详细信息,并提供诊断数据。在电机的驱动电流脉冲之间,电机线圈运动经过电机磁场时,就会产生电压。这一信息通常被称为电机的速度和/或负荷角(SLA)。可以通过监视反电动势的幅度来很好地近似步进电机的角速度。
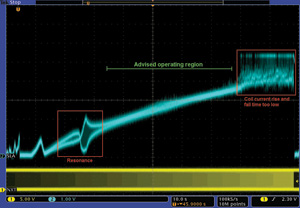
图1给出了使用AMIS-30522细分步进电机控制器驱动安装在机械系统中的传统步进电机时SLA引脚的映射。这一信息是在对NXT输入(确定电机激励速度的时钟输入)进行扫频的过程中收集的。随着它从左向右移动,激励的频率升高,可以清晰地看到不同的工作区域。测量整个系统的电机特性的能力是AMIS-305xx系列所具有的一种非常强大的特性——特别是它能够处理传统的设计难题,而在此之前,系统设计人员只分析电机的共振性能,而没有认识到一旦整个机械装置放在一起之后这些区域可能会发生变化。