・上一文章:基于指针式电测仪表自动化检定系统设计
・下一文章:基于STM32F103设计的深海远程电机控制系统
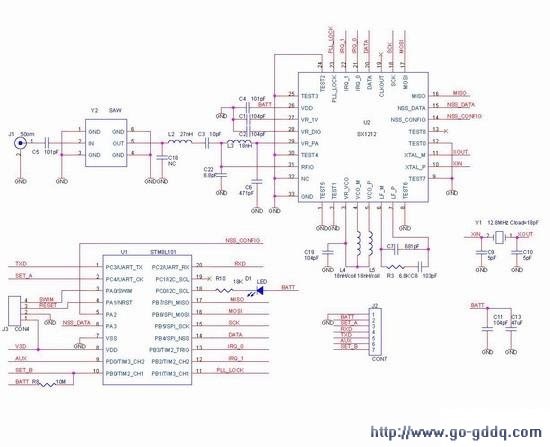
系统电路设计
系统主要由一个MCU和SX1212组成见图一。MCU选用了ST公司的低功耗单片机STM8L101F3,SX1212与单片机通讯采用SPI接口,与外部终端通信采用UART接口。由于高度集成化SX1212外围零件已经很少,所以设计的关键是RF前端的匹配电路的设计。另外高频部分的走线尽量的短粗,元器件参数要根据线路板的实际情况作出适当的调节,以抵消分布参数的影响。一般的RF芯片发射与接收端口的阻抗并不是标准的50Ω阻抗,要达到最佳的接收效果必须将输入阻抗通过外围器件的补偿使之与50Ω的天线匹配,电路如图1所示。图中Y2是声表面滤波器,用于衰减规定频带以外的信号,L2,C3,C22是阻抗匹配网络,L4,L5,压控振荡器电感,调整压控振荡电感,可以使模块工作于不同的频率,C7,R3,C8是锁相环电路。
工作模式设计
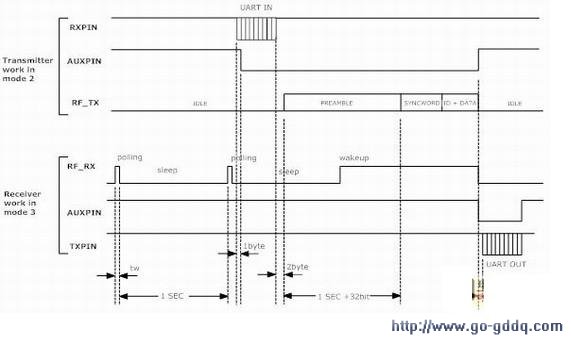
典型的无线收发机编码如下图。

前导码为“1010”交替码,其作用是使目的接收机时钟与发射机同步,正常模式下前导码长度一般为32bit即可,如工作在省电模式时序下,前导码还有唤醒接收机的功能,此时发射机必须发送较长的前导码将省电模式下的接收机唤醒进入正常的工作状态。如设置接收机1秒钟唤醒一次,那么接收机每间隔1秒钟唤醒一次搜索前导码(tw),持续长度一般为16bit。而发射机首先发射1秒以上的前导码再发射后面得同步码等,这意味着接收机在唤醒的周期,只要信道中发现前导码,在正常情况下都能够可成功检测到并唤醒接收,示意图见图二。
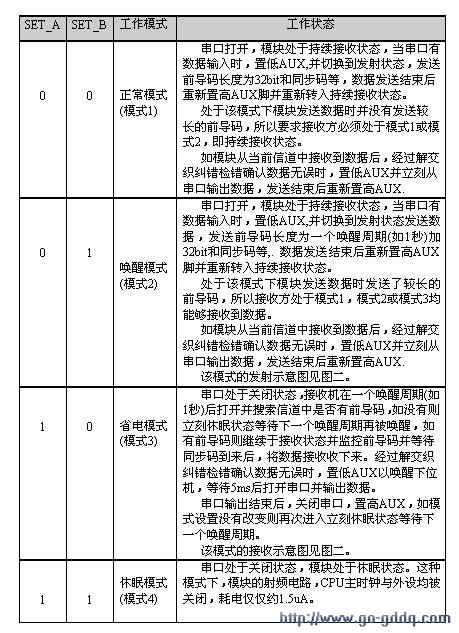
这里我们设计了四种工作模式,见表一,这四种工作模式是利用MCU的SET_A和SET_B脚转换的,四种模式均可以相互转换。
表一:四种工作模式说明