・上一文章:用超低功耗无线芯片SX1212设计的无线数传模块
・下一文章:基于用单片机设计的多普勒血流计系统
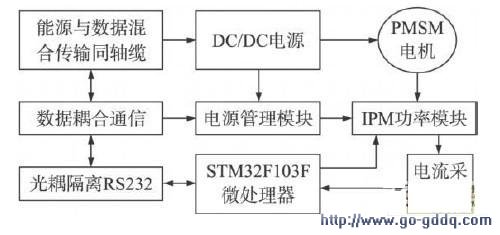
1 系统控制原理
图1是深海远程电机控制系统的组成框图。能源与数据混合传输同轴电缆既给整个水下系统供电同时又提供了上位机和控制系统通信的线路, 供电电压为1 kV。数据耦合通信模块负责在同轴电缆上分离或叠加经调制过的信号, 而DC/DC 电源负责把同轴缆上的1 kV 高压降为电机的300 V工作电压并产生供控制系统使用的15 V 电压。STM32F103微控制器通过光耦隔离的RS232与数据耦合通信模块进行数据交换, 即接收指令或反馈电机工作状态。由于电机运行时将产生很大的谐波, 干扰同轴电缆上的数据信号, 严重时将导致远程控制出错而引起水下系统的误操作, 所以要求设计的控制系统能很好的响应上位机发出的控制指令。
2、系统设计
2.1能源与数据混合传输同轴电缆
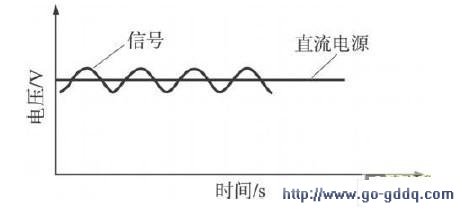
能源与数据混合传输同轴电缆是实现远程控制的关键部分,电缆上的传输电压波形如图2所示。
混合传输原理就是在发送端将直流电源和数据信号进行叠加,然后通过同轴电缆实现耦合后的传输,在接收端再用滤波器将电源和数据分开,这样只用一根同轴电缆就实现了对控制系统的供电和控制。
2.2数据耦合通信模块
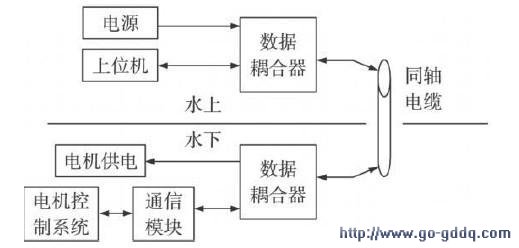
数据耦合通信模块主要由数据耦合器和调制解调电路两部分构成。调制解调电路对数据信号进行调制和解调处理以实现信号的远距离传输。数据耦合器实质上就是滤波器,它是实现混合传输功能的主要部分,其在整个系统中的作用如图3所示。
由于高压功率电源和数据信号均要在此通过,故要求滤波网络耐高压,且传输功率信号损耗要小、效率高。该滤波网络在同轴电缆的水上和水下两端各有一组,其结构完全相同。