・上一文章:汽车音响功放集成电路代换技巧
・下一文章:安森美半导体针对汽车应用的高能效解决方案
c.横摆角速度、纵向/横向加速度传感器
横摆角速度、纵向/横向加速度传感器的安装位置基本相同,输出都是0V-5V的模拟量,由于汽车颠 簸造成的信号波动特性一致,故封装在同一模块中。其硬件接口如图8所示,实现硬件模拟前置滤波,以抑制来自传感器的模拟信号中的高频噪声成分,防止在采样 过程中出现混叠现象。运放使用满摆幅输出的LMX324。
调整图8中各个阻容元件的参数,即可设置滤波截止频率和延时大小。汽车运行过程中,在较好路面上行驶时,由于信号较好,延时尽量要小,而在颠簸路面 上行驶,则希望滤波效果要好。但是由于硬件滤波的频率特性一经设计完毕,无法实时修改,故需要在软件中设计数字滤波环节。数字滤波常用的有维纳滤波器、卡 尔曼滤波器、线性预测器、自适用滤波器等。在这里选用计算量小、实时性能好的一阶低通滤波。

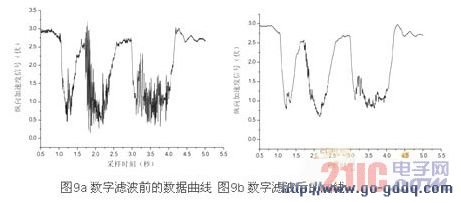
k的选择取决于当前的路面情况,而当前路面情况,则通过数字滤波前的原始信号来识别。微控制器把滤波后的信号、原始信号、k的值、路面识别结果打包后,通过CAN总线发送给ECU。图9a和9b分别为颠簸路面实车试验中采集得到的纵向加速度传感器的一组对比曲线。
本文讨论了 ESP系统中常用传感器的结构特点及信号特性,并设计了各个传感器的信号处理接口,其中包括硬件接口电路以及软件处理方案。设计了包含横摆角速度、纵向/ 横向加速度传感器的集成模块,通过CAN总线与ECU进行数据传输,具有较好的抗干扰性和可靠性。本文的设计已经在实车试验中得到验证。





