・上一文章:高电源抑制的基准源的设计方案
・下一文章:基于DSP的无刷直流电机智能控制系统研究
4.软件结构
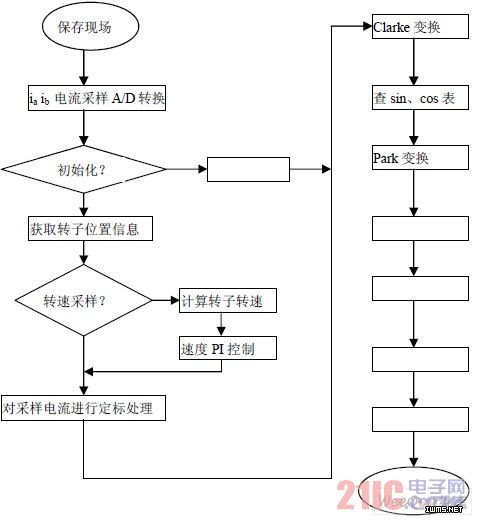
系统软件包括软硬件初始化程序、主程序、初始定位子程序、控制过程显示程序和中断服务子程序5个部分。系统复位后首先执行初始化程序,实现对DSP内部各功能模块工作模式的设定和初始状态的检测;然后执行主程序,开启定时中断、外部保护中断及初始定位子程序;获得动子准确位置信息后,进入运行状态,执行中断服务子程序[5]。 系统的主要功能,包括电流大小的计算、速度位置信息和矢量变换,由中断服务子程序来完成。根据系统运行原理设计其软件结构。图5为系统运行程序图:
系统中断子程序图如图4所示:
5 .结论
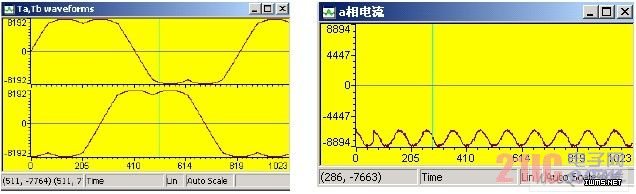
本文设计的算法程序已经初步调试成功,能够实现基本运行,证明软硬件设计的正确性。图5所示为部分调试结果
由于直线电机端部效应及外部载荷直接加载等特点,使得对直线电机控制系统稳定提出了较高要求。为提高其控制的鲁棒性,其算法还有待于继续改进。必须采取合适的控制算法和控制策略,使系统动态响应快,抗干扰能力强,稳态跟踪精度高。因此直线电机控制理论有待于进一步深入的探讨与研究。





