����һ���£�����DSP�Ľ�������ͬ��ֱ�ߵ��ʸ������ϵͳ���
����һ���£�����PF25256�ʵ�IIC����EEPROM����
����3 ����ϵͳ���
����3.1 ϵͳ����ͼ
��������ϵͳ�����ٶȡ�����˫�ջ����ƣ��ٶȻ�����������ǿϵͳ�Ը��ر仯�Ŀ���������������ת�ٲ�����Ϊ���ϵͳ�Ķ�̬�;�̬���ܣ��ٶȻ�����������ģ��������PID�����㷨��������ʹ�������������ٶȿ��������������ϵͳ���Ŷ��������ã�Ϊ�˵���������������PID�����㷨��DSPͨ���ٶȻ��͵�����ʵʱ����PWM��ռ�ձ���ʵ��ת�ٵĿ��ơ�ģ��������PID��PID�����㷨����Ч��ϣ�ʹϵͳ���н�ǿ����Ӧ�ԣ�ȷ���ٶ����������Ŀ���������
��������ϵͳ����ͼ��ͼ2��ʾ������nrΪϵͳ�ٶȸ�������UnΪ�ٶȿ���������Ŀ�������UiΪ��������������Ŀ�������UKfΪ��������������UkΪ����ģ��
����ģ��
��������ģ���ǹ��ʵ��ӵ���������һ���Ĺ�������ٹ���һ��ģ�顣 [ȫ��]
����Ŀ�������nnfΪ�ٶȻ���������nΪ�ٶȻ��ı�������
����3.2 ģ���Ӽ�����������
�����ٶȻ���������ת�ٸ���nR��ת�ٷ���ֵnnf�����e��E�������仯��ec��EC����Ϊģ�������������룬��Kp��Ki��Kd��Ϊ������ҳ�PID�����E�����仯��EC��ģ����ϵ�������в��ϼ��E��EC���ٸ���ģ�����ƿ���ԭ����PID�������ߵ����������㲻ͬ��E��EC�±��ع��̶ԡ�Kp����Ki����Kd��Ҫ��
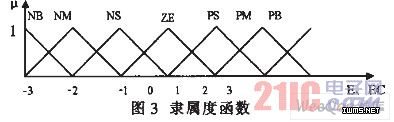
����ģ���Ӽ�ΪE=EC=��Kp=��Ki=��Kd=�xNB��NM��NS��ZE��PS��PM��PB�y=�x�����У���С���㣬��С�����У�����y�������������ΪE=EC=�x-3��-2��-1��0��1��2��3�y�������������Ϊ��Kp=�x-0.3��0.3�y����Ki=�x-0.08��0.08�y����Kd=�x-3��3�y�������Ⱥ������������Խ�ǿ�����Ǻ�����E��EC�����Ⱥ�����ͼ3��ʾ��
����3.3 ģ�����ƹ������
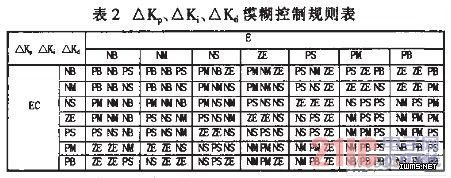
�����ٶȻ�ģ�����ƹ������if�������� and then�����������ʽ������ݾ��鲢ͨ���������Եõ�����49�����ƹ���ģ�����ƹ������2��ʾ��
������1�� if E is NB and EC is NB then ��Kp is PB����Ki is NB����Kd is PS��
������2�� if E is NB and EC is NM then ��Kp is PB����Ki is NB����Kd is NS��
������
������49�� if E is PB and EC is PB then ��Kp is NB����Ki is PB����Kd is PB��
����3.4 ģ��������ģ���о�
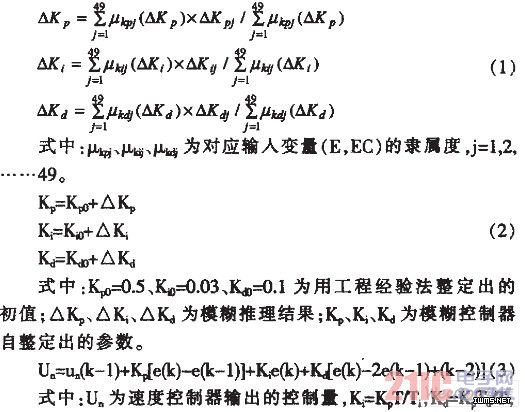
��������ģ�����ƹ��������KP����Ki����Kd��������P��K��i��K��d��K�����ü�Ȩƽ����������������Kp����Ki����Kd��ȷ��ֵ���ٽ�Kp��Ki��Kd�Ĵ���PID�����㷨�У�������ٶȻ�����Ŀ�����Un�������PID�������������������̡�
����T=10msΪ�������ڡ�





