摘要:D-S证据理论可以有效地处理不确定信息,是有效的数据融合方法之一,但在证据高度冲突时,其归一化过程会产生有悖常理的结果。针对这个问题,国内外的学者提出了许多不同的改进方法,基本上可分为两类:修改组合规则和修改融合模型。在此总结分析了相关的国内外典型文献的改进思想,并进行系统条理的分析,为证据理论的发展和改进提供了有价值的参考。
关键词:D-S证据理论;数据融合;证据冲突;传感器
引言
无论在军事上还是非军事上,多传感器数据融合已经成为全球研究的热点之一。数据融合的重要研究内容之一是融合方法。最初的融合分为3个层次:像素级融合、特征级融合和决策级融合。D-S方法是决策级融合的重要方法,在数据融合领域应用极为广泛。该方法以D-S理论,即证据理论为基础,核心是Dempste合成规则。
Dempster-Sharer证据理论简源于20世纪60年代Dempster在多值映射方面的工作,他将证据的信任函数与概率空间的一概率的最大、最小值相关联构造了不确定推理模型的一般框架,此后,Sharer又在此基础上进行了扩展,形成了能够处理不确定不精确不完整信息的证据理论。它凭借其能够表示不确定性未知等概念的优点在数据融合中得到广泛重视,特别是成功应用于图像处理、机器人导航、医疗诊断决策分析等需要处理不确定信息的领域。
证据组合规则是证据理论的核心,它将来自不同信息源的独立证据信息组合,产生更可靠的证据信息。但是在证据高度冲突和完全冲突的情况下D-S理论的组合规则失效。在战场环境下(特别是在敌方的电子反侦察的情况下,传感器对目标的检测存在漏检、错检的情况,可能提供很不相同,甚至是相互矛盾的数据。这些现象造成了同一传感器在时间上的证据冲突,D-S组合规则在此种情况下无法得出正确的结果。为此D-S组合规则的修正方法正是针对时域冲突的特点提出的。
1 研究现状
设有一个有限假设空间,2Θ为空间中所有命题的穷举集合,D-S理论用“识别框架(Frame of Discernment)”描述构成整个假设空间的所有命题的集合Θ,识别框架中的各元素要求互相排斥而集合中的命题称为识别框架的原命题。
定义1 设Θ为一识别框架,2Θ为Θ的幂集,则函数m:Ω→[0,1],在满足下列条件:

A≠φ时,称m为Ω上的基本概率分配;

,m(A)称为基本概率分配函数(BasIC Probabil-ity Assignment,BPA)。BPA反映了证距识别框架中的命题A的支持程度。A称为焦元,所有焦元的集合称为核。
定义2 Θ为一识别框架,m(A)为Ω上的基本概率分配函数,满足下列条件的函数称为信任函数(Bilief Function):

即A的信度函数为A中每个子集的信度值之和。
定义3 Bel为一信任函数,有一函数Pl:Ω→[0,1],
,

,则Pl为A的似然函数。
定理1 m1与m2为识别框架Θ上的两个独立证据,Ω为的Ω幂集A、B为幂集中的元素,则这两个证据组合后得到的组合证据为:
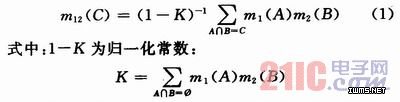
这就是著名的Dempster-Shafer证据组合公式利用它进行多证据组合式进行不确定推理的关键。
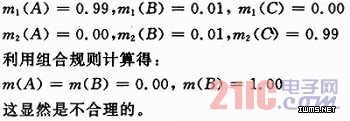
D-S组合规则的优点在于证据间的冲突较小时,证据置信度向不确定性较小的命题集中。但是,在证据严重冲突的情况下,组合结果往往与实际情况不相符合。而且D-S组合规则缺乏鲁棒性,证据对命题具有“一票否决权”。也就是说,如果有一个证据否定了命题A,即使有绝大多数的证据证明命题A是正确的,合成结果也是否定命题A的。
假定,在区分目标A,B和C时,由2个独立的证据源(传感器信息源)提供的BPA分别为:
2 方法改进
2.1 对组合规则进行改进
2.1.1 Yager改进方法
1989年,Yager提出了D-S理论的失效问题,并对组合规则进行了改进。在他以后,又有许多改进方法提出,都集中于冲突信息的利用上。主要解决冲突信息在什么集合上分配,以什么方式分配两大问题。认为,既然对于冲突的证据无法做出合理的抉择,就应该将冲突全部付给未知项X。改进后的合成公式为:
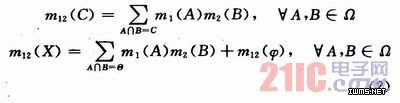
虽然该改进可以合成高度冲突的证据,但由于它对冲突证据仍然完全否定。所以当证据源多于2个时,结果并不理想。
[1] [2] [3] 下一页





