・上一文章:电气电站在用电高峰期优化生产方案探讨
・下一文章:基于TMS320C6416的语音净化系统
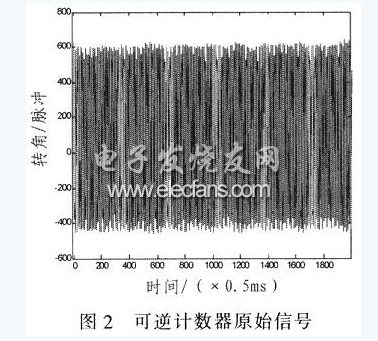
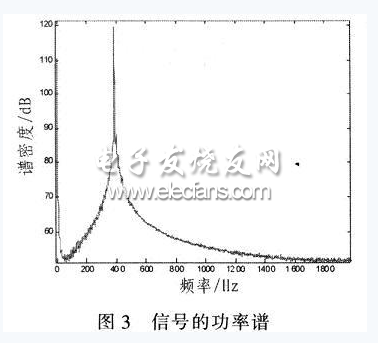
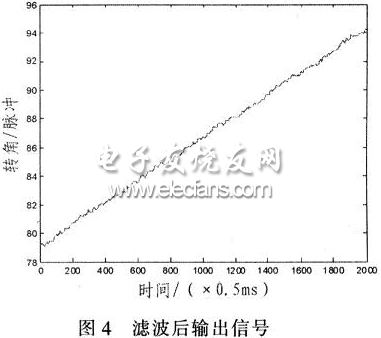
图2为1 s内采集的可逆计数器的输出信号,从图中可看出:有用信号已被抖动信号和量化噪声完全覆盖。图3为信号的功率谱,从图中可看到,抖动信号在功率谱中占很大分量(功率谱的最大值处的频率对应抖动频率),还原出被测量信号必须对可逆计数器的输出信号进行低通滤波,以滤除抖动及其他杂散信号。图4为滤波后的脉冲输出,不同于图2,从图4中可清楚地看出:在2 000点(即1 s时间内)恒定地球转速下累计约15个信号脉冲。
可编程逻辑器件为FIR滤波器的设计提供高灵活性,可采取多种结构,例如并行流水线结构、串行结构等。考虑到采样率相对不是很高,为节约系统资源,这里采用自行设计的串行结构滤波。
4 接口部分
由于陀螺工作的外界条件不同,陀螺工作的最佳参数可能也不相同,这就要求处理器能够根据需要实时调整测试电路参数,并实时监控电路和陀螺状态,对出现的问题能够自我感知。UART1为面向上位机的通讯接口,经电平转换后通过RS232线缆连接至计算机.它一方面接收计算机的控制参数,另一方面将采集的数据传至计算机。
4.1 抖动稳频控制
UART2与稳频板相连接,它对稳频电路的控制主要包括:(1)控制稳频电路的开启或关闭;(2)监测稳频是否异常;(3)实时读取光强和控制电压值。
而UART3是与抖动电路通讯的接口,它对抖动电路的控制主要包括:(1)控制抖动电路的开启或关闭;(2)监测抖动是否异常,监测抖动频率;(3)下载噪声表。UART2和UART3由于传输距离不是很长,设计中直接采用3.3 V电平,无需电平转换,经实际测试,没有出现误码,通讯稳定。
4.2 A/D转换和D/A转换部分
A/D转换部分负责采集温度、光强、控制电压等模拟信息,同时采集陀螺内部温度,实现温度补偿,该系统选用ADS8344。ADS8344是一款高性能、低功耗的16位的A/D转换器,内有高精度基准电压,最大采样频率为100 kHz,信噪比达84 dB,包含8个单端模拟输人通道(CH0~CH7),参考电压VRFF范围为500 mV~VCC。ADS834通过三线SPI接口与Nios II处理器通讯。为了控制环形激光器的工作电流,D/A转换部分采用具有双路输出的12位D/A转换器AD5322,该器件具有超小体积,超小功耗的特点,完全与Nios II处理器SPI接口兼容。
5 实验及结论
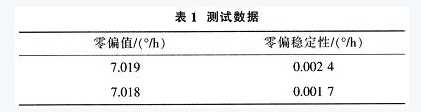
按照上述设计结构,研制以嵌入式软核处理器Nios II为核心的二频机械抖动激光陀螺信号处理系统,并对某型国产二频机抖陀螺进行实际测试,测试数据如表1所示。
经长时间测试检验,系统运行稳定可靠,能够有效控制与监测陀螺的运行工作参数,达到预期设计要求。