・上一文章:液晶电视亮度感应自动控制的设计
・下一文章:基于远距离射频技术的公交车自动报站系统

由于摄像头需要一个9~12V的电压才能正常工作,而充电电池的电压只有6~7.2V。所以DC-DC升压电路便成为必需。DC-DC电压变换采用MC34063A集成电路,该器件内部集成了温度补偿器、比较器、动态电流带限占空比可控的振荡器和一个高电流输出驱动器。
4 电机驱动模块
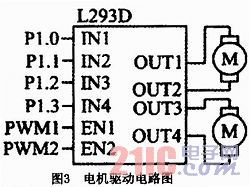
驱动机器人行走的两个电机需要不同的转速来实现转弯。选用的驱动芯片为L293D,它包含4个输出通道,最大输出峰值电流为12A,能同时驱动两个直流电机工作;其信号输入端和使能端接收到来自单片机的信号,控制电机的通断以及正、反转,还可以通过向使能端输入不
同占空比的方波信号来调整电机转速(PWM方式)。如图3所示,IN端口接控制信号,OUT端口接电机的两端,EN端口接使能信号。一组IN端口输入为高/低或低/高电平时,能实现电机的正/反转。一组IN端口输入均为高或低电平时,电机将停转。EN使能端为高电平时,相应端口输入信号有效;反之,则输入信号无效。在EN端输入PWM波,通过调整PWM波的占空比,即可实现电机的无级调速。