・上一文章:PCB制造中防止缺陷的方法案例
・下一文章:LED路灯节能监控系统的设计
引言
智能机器人之所以叫智能机器人,这是因为它有相当发达的“大脑”。在脑中起作用的是中央计算机,这种计算机跟操作它的人有直接的联系。最主要的是,这样的计算机可以进行按目的安排的动作。正因为这样,我们才说这种机器人才是真正的机器人,尽管它们的外表可能有所不同。
智能机器人具备形形色色的内部信息传感器和外部信息传感器,如视觉、听觉、触觉、嗅觉。除具有感受器外,它还有效应器,作为作用于周围环境的手段。这就是筋肉,或称自整步电动机,它们使手、脚、长鼻子、触角等动起来。
我们称这种机器人为自控机器人,以便使它同前面谈到的机器人区分开来。它是控制论产生的结果,控制论主张这样的事实:生命和非生命有目的的行为在很多方面是一致的。正像一个智能机器人制造者所说的,机器人是一种系统的功能描述,这种系统过去只能从生命细胞生长的结果中得到,现在它们已经成了我们自己能够制造的东西了。
自从1920年捷克斯洛伐克作家卡雷尔,恰佩克的《罗萨姆的机器人万能公司》问世,人们便对机器人充满了幻想与期待。随着社会的不断发展,各行各业的分工越来越明细,机器人也能在其中扮演重要的角色来替代人们的劳动。与此同时,随着科学技术的发展,探险、救灾、排爆等危险场合工作的机器人,以及自动化生产中机器人的应用也日益广泛。因此,智能救援机器人的研制已成为急需和必要,文章就智能救援机器人的设计进行了探讨。
1 智能救援机器人的硬件设计
该智能救援机器人主要由电源模块、检测感应模块(实现巡线、避障、捡放硬币、测距功能)、声光报警模块、控制器模块、电机驱动模块、显示模块六部分组成,其结构框图如图1所示。

1.1 电源电路
智能救援机器人全部能量来源于位于机器人底部的六节五号电池,经过传统的7805稳压电路给其单片机及外围传感器供电,其电路如图2所示。部分传感器采用5V低电压供电可以避免机器人过早检测障碍物而停止前进。
1.2 检测感应模块
1.2.1 巡线电路
巡线模块我们采用红外对管。红外对管由LED和光电三极管组成,光电三极管根据从地面反射回来的LED的光的强度而改变积极基极电流。在光电三极管基极接一上拉电阻,则可根据基极电压的测量判断反射光的强弱,强光说明探测器下方是白色,弱光说明下方光较弱,大部分光被黑线吸收。对于输出的模拟信号,我们将其引入五个电压比较器LM339进行处理。
1.2.2 避障电路
避障部分采用光电开关,将其安放在机器人需要测量的各个方向。为减少它的测量距离保证机器人的正常运行,我们采用的是低电压5V供电,供电电压虽略显不足,但能保证它的正常短距离探测。光电开关的信号线的高低电平可反映前方障碍物的有无,障碍物检测电路如图3所示。
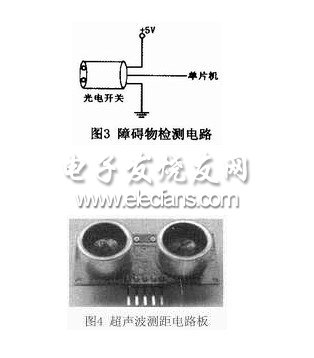
1.2.3 超声波测距电路
由于超声波执行性强、能量消耗慢、在介质中传播距离较远的特点。我们采用DIP-ME007超声波测距模块完成高度的测量功能,其电路板如图4所示。DIP-ME007超声波测距模块能比较迅速、方便地测出桥底部距测距模块之间的距离,此模块共有五个引脚VCC、tring、echo、out、GND。DIP-ME007超声波测距模块输出为PWM方式,VCC、GND接好后向tring发一个10 s以上的高电平,就可以在接收口echo等待高电平输出。





