・上一文章:指针式燃油表算法设计
・下一文章:基于系统级的电动助力转向控制测试评价研究
摘要:本文介绍智能手制动控制系统总体设计模块,分析其逻辑策略,并列出控制系统电路图。智能手制动控制系统实现驻车制动的智能化,减少溜车事故的发生。
随着公路的发展和车流密度的增大,交通事故数量也随之显著上升,因而对制动系统性能提出了越来越高的要求。由于驾驶员疏忽,驻车未拉手制动,造成交通事故频繁发生。因此,汽车驻车时,自动提示功能和实现汽车紧急制动,显得尤为重要。
智能手制动控制系统主要利用挡位传感器和车速传感器进行信号采集,通过ECU进行信号分析和控制,通过拉索式电子驻车系统执行驻车命令来实现智能驻车。
1 总体设计
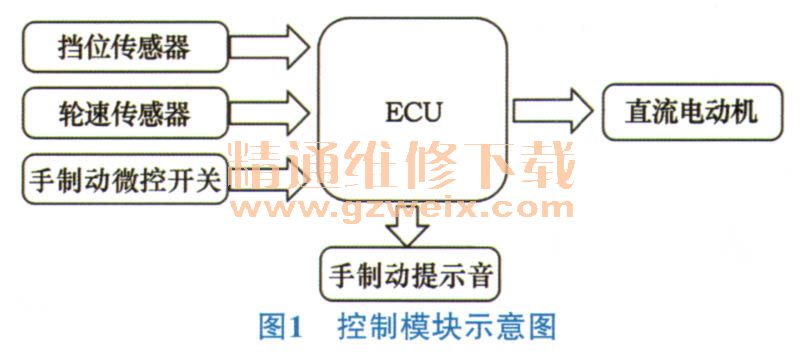
本装置由ECU、挡位感应传感器、轮速传感器、手制动微控开关、直流电动机等组成。可分为信号采集模块、执行模块和控制模块。
信号采集模块主要由手制动微控开关、轮速传感器和挡位传感器组成,分别采集手制动拉起信息、轮速信息和挡位位置信息,将信号传递给ECU。
控制模块示意图如图1所示。通过采集手制动传感器信号、轮速传感器信号、挡位传感器信号,ECU始终处于监控状态。停车时由ECU发出控制信号,开启提示装置,监测到发生溜车时,ECU控制直流电动机正转实现紧急制动。
执行模块拉索式电子手制动结构如图2所示。拉索牵引式电子手制动的制动执行机构和传统手制动无异,同为制动蹄式,通过直流电动机的正反转控制拉索的长短,来达到与手制动相同的效果。






