3 系统的软件设计及调试
系统的软件设计包括对
转向角传感器接收程序的设计,即CAN总线的接收程序的设计(
转向角传感器是通过CAN接口把数据传送出来的),以及在上位机上利用Matlab对接收来的数据进行处理的相关程序设计。
3.1 CAN总线的接收程序设计
CAN总线是目前在汽车上应用得最广泛的现场总线之一,是目前发展比较成熟的总线。在各个领域已经得到了广泛的应用,特别是在汽车领域,它能够实现点到点以及一点到多点的通信,能够实现系统数据的共享。
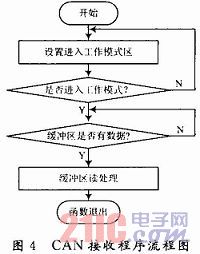
转向角传感器数据输出接口为CAN接口。LPC2219控制器中具有CAN的控制器,在这个系统中CAN的程序设计包括:CAN的初始化程序设计,CAN接收程序的设计。CAN接收方式有查询式接收和中断式接收,查询式接收方式总是不停地查询接收标志位,对控制器来说这是种浪费,中断式接收方式是当接收到数据时,控制器进行中断,没有接收数据的时候ARM可以执行其他的任务,该系统采用的是中断式接收方式。具体流程图如图4所示。
ARM微控制器接收到的数据通过串口来显示,并将其保存在txt的文档里,便于在Matlab中处理。具体部分数据如下所示:

接收到的信息包括:其中CAN:00表示接收的CAN通道为CAN控制器1;FIF:08表示接收的是具有8个字节的数据扩展帧;FID表示帧的ID号;Dat表示接收到的数据,如果是远程帧的话,则为0。
上一页 [1] [2] [3] [4] 下一页





