・上一文章:华硕m4n68t-mlev2型主板,开机有一长两短的报警声,不开机
・下一文章:开发与及验证一种非电控发动机限速控制系统
近年来汽车电子技术飞速发展,为解决车载电器系统不断增多、控制日趋复杂、布线空间有限等问题,在现今的乘用车上,遍及整车的通信与控制总线系统已基本普及,技术方案也非常成熟。但对于国内的自主品牌商用车,受需求、成本、售后服务等因素的制约,总线系统的应用十分有限。随着人们对安全性与舒适性的要求越来越高,商用车的电器系统也越来越多、越来越复杂,如卫星定位系统 GPS、防抱死系统ABS、轮胎压力监测系统TPMS、影音娱乐系统等。在传统的控制方式下 ,相应的控制器、传感器和线束不断增加,使得整车线束的数量和质量大增,布线方式错综复杂,故障率上升,装配和维护难度加大。为解决此矛盾,国外许多商用车企业已采用CAN总线系统来进行车载电器装置的通信和控制。利用CAN总线系统不仅能减少线束数量,降低故障率和维护成本,实现对各电器系统的高效控制。系统本身还拥有出色的扩展性,在不增加系统层次结构、不影响系统性能的同时,可接入各类模块以实现更多的车辆功能。
1控制网络布置方案对比
对于商用车而言,主要的控制对象有以下几类: ①外部车灯和车内照明;②空调系统;③仪表显示 (包含发动机等部件的CAN总线信息);④功能性设备,如车窗 (升降及加热)、刮水器、座椅、车外影像等;⑤防护与安全设备,如气囊、安全带及相关传感器等;⑥影音娱乐系统,如收放机、导航、DVD/CD播放机等;⑦其它操作设备,如制动及离合器踏板、举升油缸、取力器等。
与乘用车相比,商用车的电器系统相对简单,不需要大量的控制节点,对成本更加敏感,减少线束的需求不是非常强烈。考虑到各电子设备的装配位置与功能划分,可行的总线系统布置主要有以下3种形式。
1.1部分CAN网络
此种控制方式如图1所示,只有部分车载电器部件使用CAN总线进行通信 (如仪表系统),其它电器系统基本都通过硬线与中央控制装置直连,在CAN网络以外的系统间基本没有信息通信,各电器系统独立实现各自的功能。

此方案可以在保证整车电器系统布置基本不变的情况下,构建小范围的通信控制网络,实现一部分重要电器系统的通信和控制,可以在一定程度上增加信息传输效率,以较低的投入获得效益。但整个系统的控制程度低,无法及时有效地获知各电器系统和部件的状态,不能实时有效地进行故障报警和诊断,可扩展性差。仍然存在大量的线束、控制器及其它电器部件,存在安全隐患。
1.2全CAN网络
此种控制方式如图2所示,采用CAN总线系统构建控制网络,以实现整车电器系统的通信和控制。主要分为高速CAN网络与低速CAN网络两部分,高速CAN网络主要连接车辆动力系统与安全控制系统,如发动机、变速器、ABS等系统;低速CAN网络主要连接仪表、照明、车门及其附件等系统。网络结构根据不同车型的电器布置,一般划分为若干个节点。
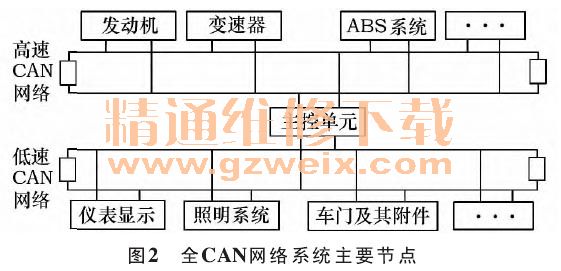
全CAN网络中的任意节点都可以在任意时刻发送和接受信息,使得主控制器可掌握实时、动态的车辆状态,并根据需要进行控制。配合车载诊断系统,可实现电器设备的功能自检、状态显示、故障报警、维修保养建议等功能。但建立此方案的技术方案复杂,实施难度大,整车制造企业需要定义各节点 (即挂在总线上的电子设备) 的功能、标称符、地址、通信报文等网络信息,然后将这些定义作为技术规范提供给各供应商,部分供应商并不具备此种开发能力。而且随着节点和子网的增加,软硬件成本增高,开发周期较长。
1.3CAN/LIN混合网络
此方案的主要结构见图3。与全CAN网络相比,该系统减少了节点数量,将一些次要节点通过LIN网络连接到主节点上。
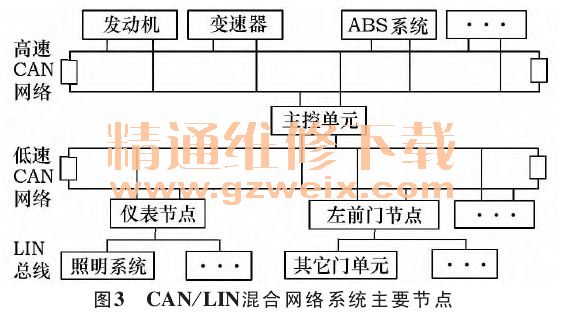
这种结构减少了CAN网络中的节点数量,相比于全CAN网络,控制功能更集中,网络负载更低,开发成本下降;相比于部分CAN网络,可将更多的电器系统连入整车控制网络,实现各系统的实时监控和故障报警,提高了系统可靠性。
")
")
")
")

