・上一文章:基于查表结构的指纹增强电路设计
・下一文章:让Windows 8总是搜索文件内容
3.6系统的软件设计
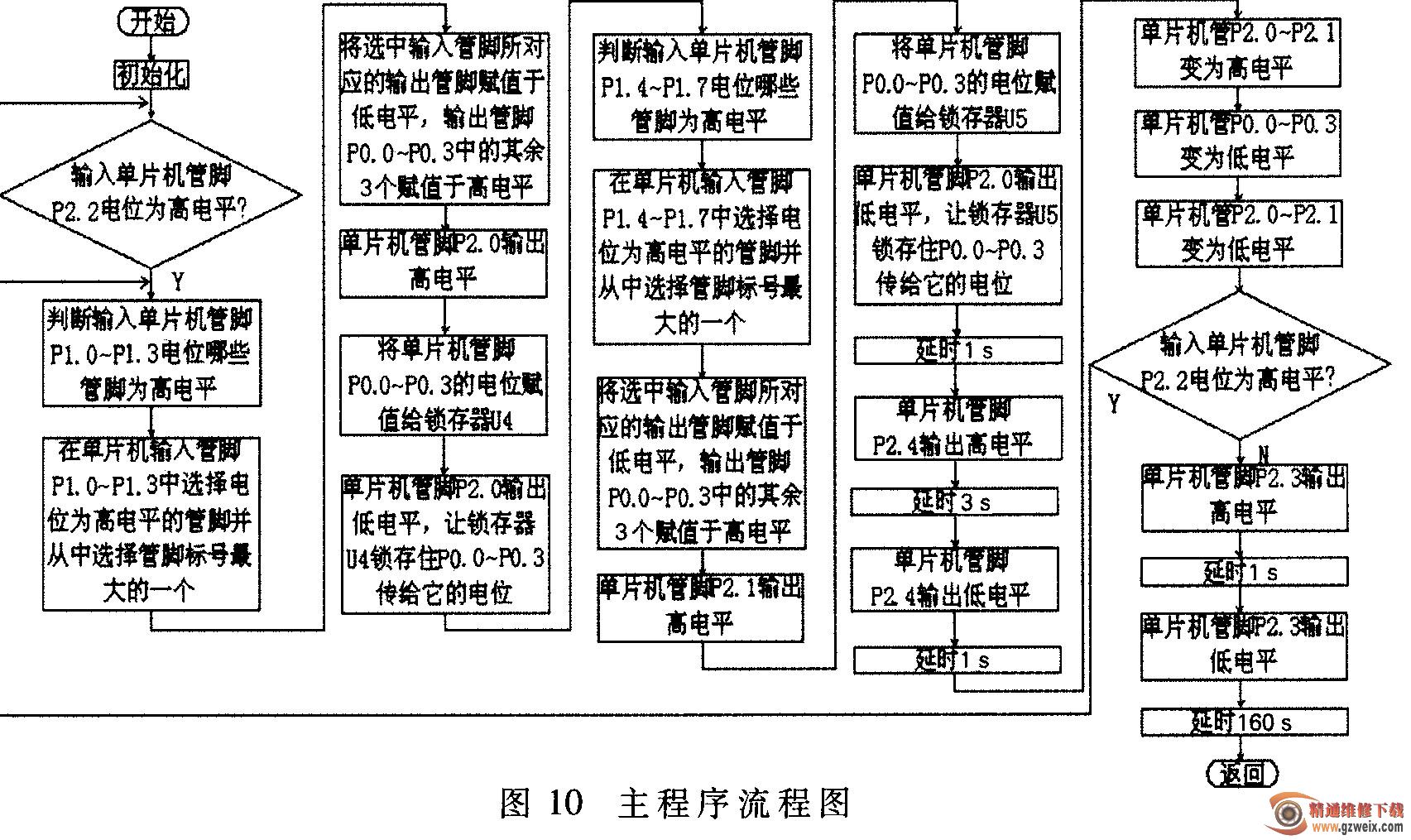
图10为主程序流程图,系统软件程序包括数据采集、数据处理和对象控制一系列子程序。为了确保把金属垃圾推到垃圾桶里,在设计程序时,电磁铁芯线圈每通一次电立即断电后,电路控制系统便立即检测金属垃圾已经被安培力推在哪几块导电板上面;让金属垃圾再一次通电,电磁铁芯线圈又开始得电产生磁场,金属垃圾在安培力作用下又向放金属垃圾的垃圾箱方向推进了一步。以这种循环方式,直至采集测点输人管脚P2.2为低电平、导电板上没有金属垃圾时,程序才结束数据采集、数据处理程序的循环。循环结束后,程序就进人了对象控制程序,程序开始控制电机转动,在导电板倒完非金属垃圾后转到初始位置,为下一次的分类做准备。管脚P2.4先输出高电平、3s后又输出低电平是为下一次电磁线圈得电产生磁场做准备。
4电路仿真和实验结果
4.1电动机转动时间控制电路仿真
图11所示的电路是电动机转动时间控制电路实现电动机正反转功能的仿真电路图,由3块时基极成电路555和2块下降沿触发带清除主从双J-K触发器芯片74LS 107N以及阻容原件继电器所组成。单片机输出管脚P2.3输出的一个高电平脉冲由5V电压源串联一个开关J1来代替,当开关先闭合1s后再迅速打开,便有
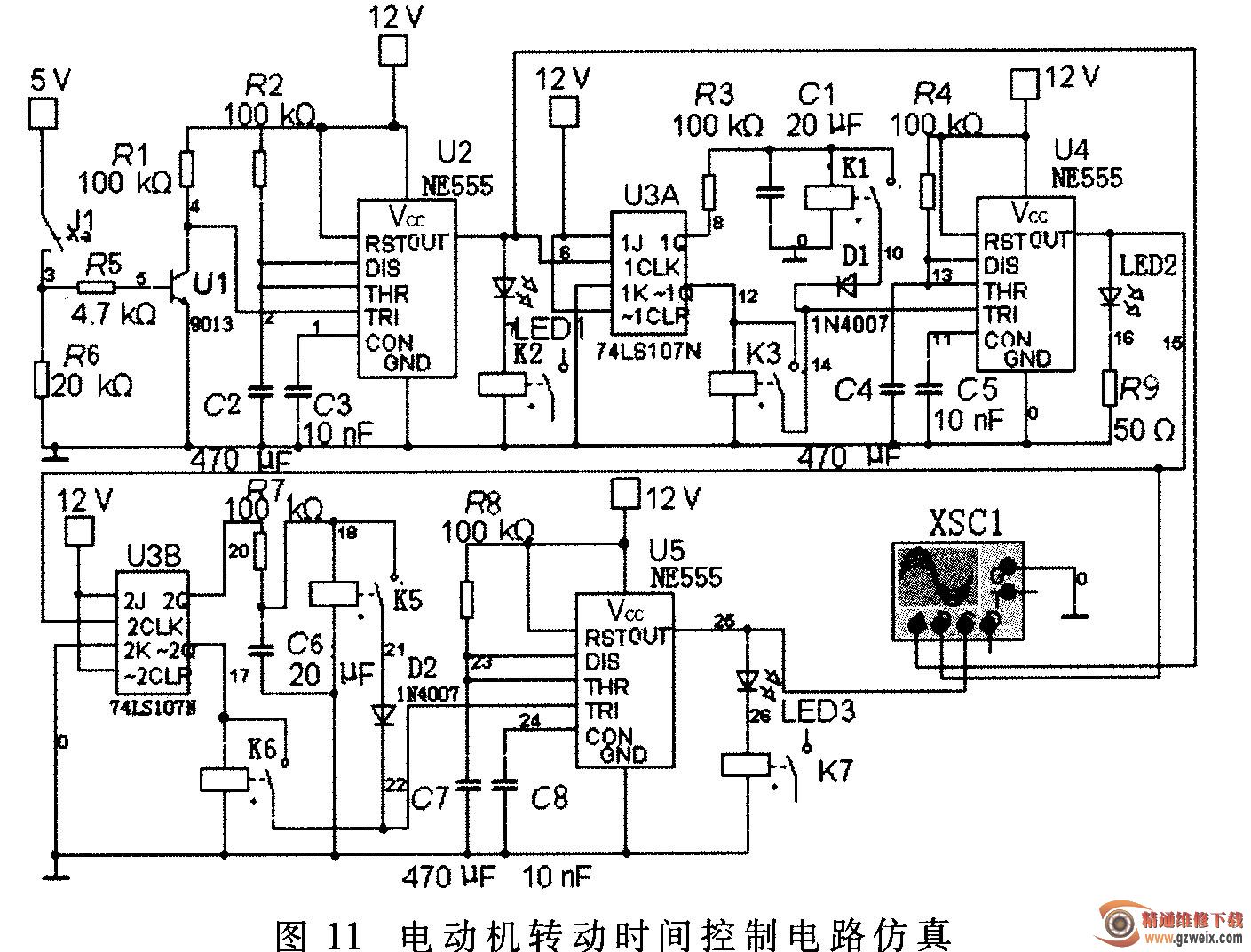
一个高电平脉冲产生。P2.3端口没有高电平脉冲输人时,电路处于稳态,发光二极管LED1不发光,继电器常开开关K2不动作;P2.3端口有高电平脉冲输人时,555芯片2脚受低电平触发,电路置位,(OUT) 3脚转呈高电平,常开开关K2关闭,发光二级管LED 1发光,表明定时开始,电动机开始正转。





