・上一文章:基于查表结构的指纹增强电路设计
・下一文章:让Windows 8总是搜索文件内容
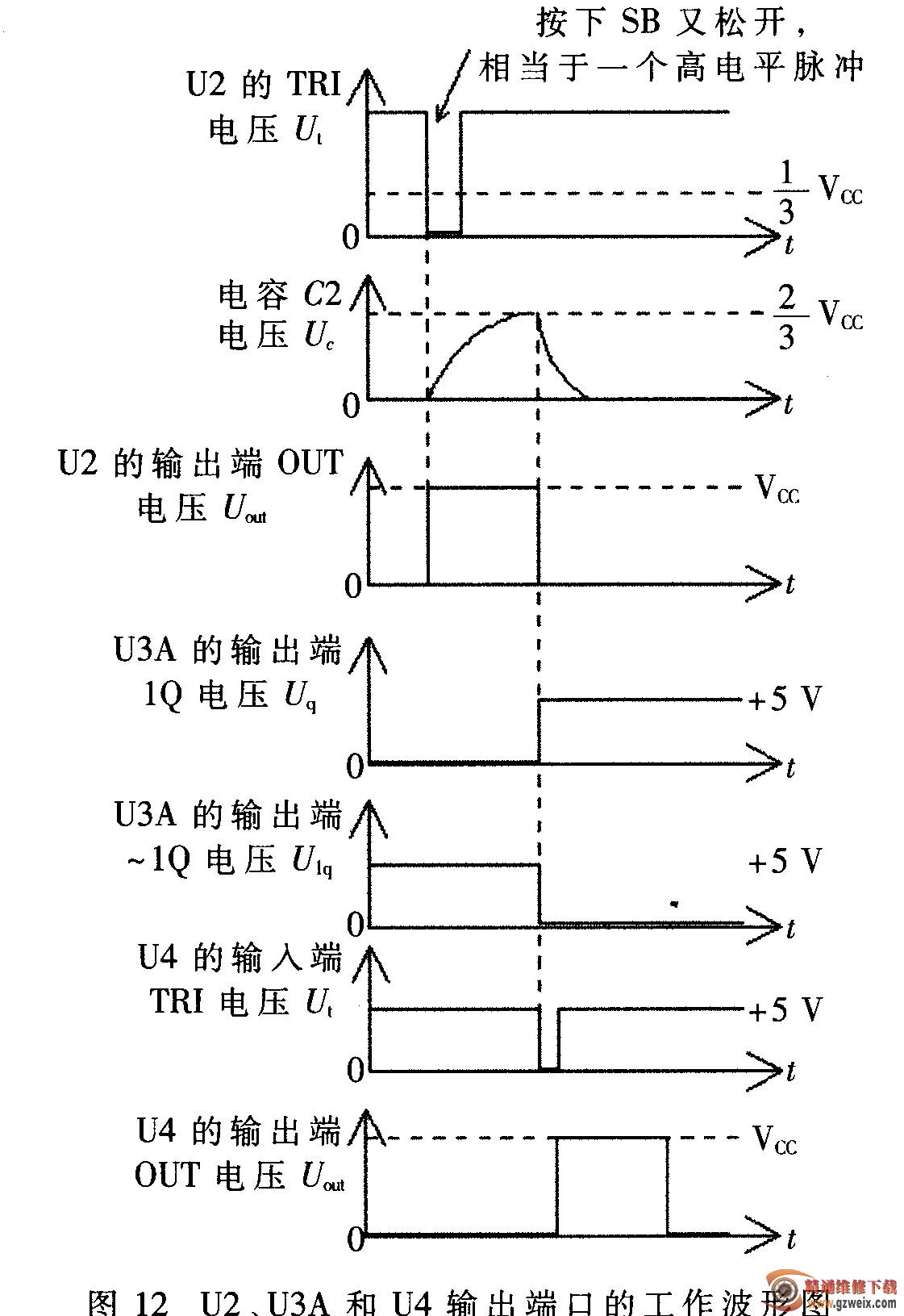
图12为户2.3端口接收到高电平脉冲前后的U2,U3A和U4端口的工作波形图。
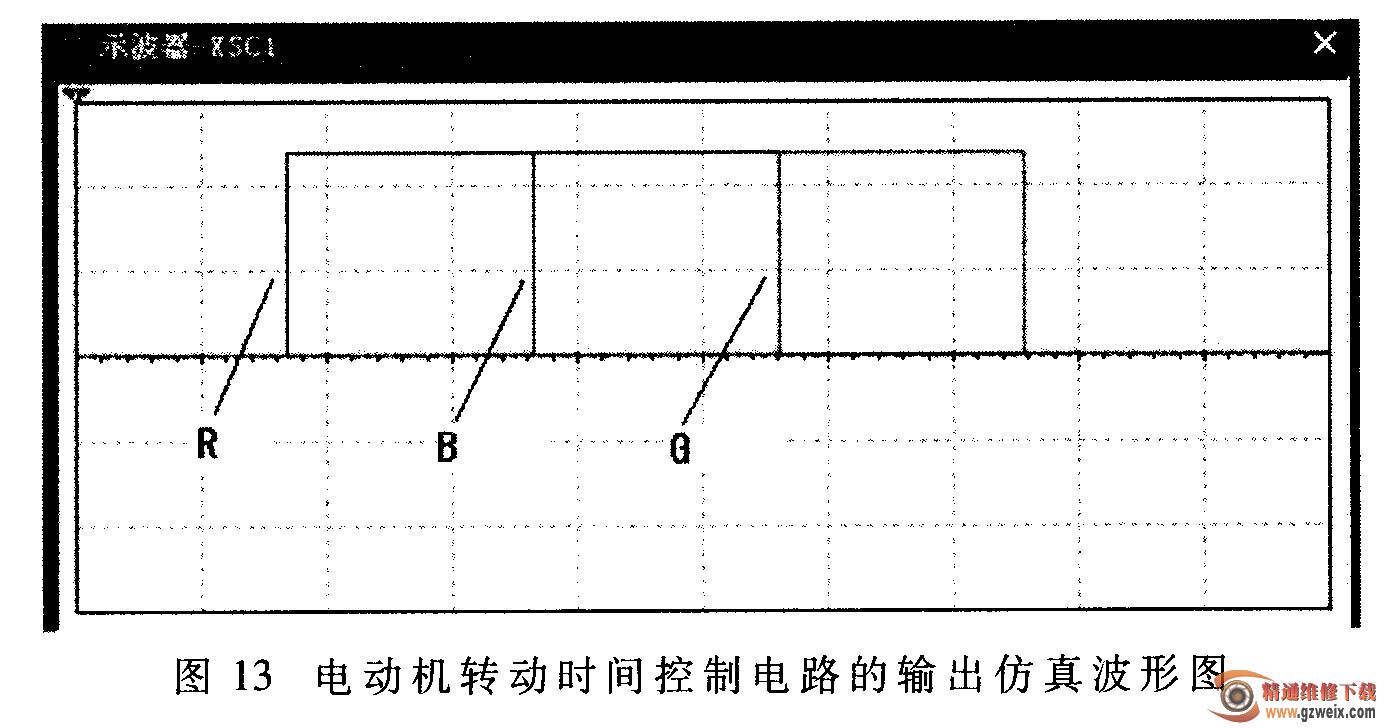
4.2电动机转动时间控制电路仿真结果
图13是仿真示波器仿真控制电动机转动的U2, U4和U5 3个(OUT) 3脚的工作波形图。其中,波形R代表控制电动机正转的波形,波形B代表等待由于惯性还未停止转动的转轴在停止转动过程中的延时波形,波形G代表控制电动机反转的波形。
综上所述,为了克服单纯使用磁场力分离金属与非金属垃圾的不足,本文提出了基于安培力的金属和非金属垃圾分类原理,并以AT80C52单片机为控制器,设计了一种适合步行街使用的小型环保自动分类垃圾箱,实现了金属和非金属垃圾自动分类的目标。





