由于元件的老化和无补偿热飘移,模拟元件的长期稳定性也存在着问题。若不进行每年专门的定期检修和重新校正,这些问题将使UPS的元件参数和输出达不到标准并最终导致系统性能下降。另外,还必须为每一个单独的UPS模式进行固定的模拟控制设计,而每一个新的UPS模式又要求重新设计并重新生产控制系统。如果没有硬件上的变化,UPS也同样得不到升级。
为了提高用户界面和通信能力,早在80年代UPS的设计者们就将目光转向了微处理器。当通过模/数转换器把微处理器连接到模拟控制系统时,它便能够采集操作数据并且将它们传送到数字显示屏上。另外,微处理器的机载存储器存有监测模拟控制系统和控制UPS功率级操作范围的参考值。然而,由于微处理器缺乏高频转换控制时所要求的计算速度,这些由微处理器辅助的UPS系统仍然依靠模拟运放控制。
为了获得对UPS系统的实时数字控制,设计者们又看中了高速的数字信号处理器(DSP),它能够每秒钟执行大约3千万条指令。在工作时,DSP把软件提供的参考信号与逆变器的实际显示值进行比较,然后通过高速计算来产生PWM转换控制的输出值。使用DSP来取代模拟线路有许多优点,其中包括不受元件老化和温度飘移的影响而具有稳定的系统参数;另外,对控制系统的升级可以仅通过软件而不对硬件进行任何改变。UPS的操作信息也能够通过调制解调器进行远程存取,再进行工作参数的调整以及基于软件的维修;最后,由于DSP的自我校正和远程服务特点,使得维修费用更加的低廉。
3 逆变系统的DSP控制及谐波校正算法
UPS系统的大多数电力负载都是非线性的,因此所产生的谐波电流必须在逆变器的输出中进行滤波,从而把谐波失真降低到容许的程度。DSP控制的UPS系统采用了软件控制的谐波调节器,它可以动态的适应负载条件的变化,并且不用手动就可以对负载谐波进行自动补偿。这样,即使在非线性负载变化的条件下,对于使用了DSP的复杂信号处理的操作,也能够提供正弦负载电压,同时也避免了对大规模无缘滤波器的使用。
增强型平衡功率(BP)UPS系统采用了德州仪器公司的DSP TMS320C25。BP
逆变器的DSP控制采用了谐波校正算法。如图2所示:先对UPS脉宽调制逆变器的输出进行采样,并在负反馈环路中将其转换为有效电压。对逆变器的实际输出与软件提供的有效参考值进行比较后产生一个误差电压,将该误差电压通过比例积分控制来消除稳态误差的引入,再将其结果为误差补偿信号,然后从该误差补偿信号中减去谐波失真信号,最后将所得的结果作为PWM逆变器的输入信号。
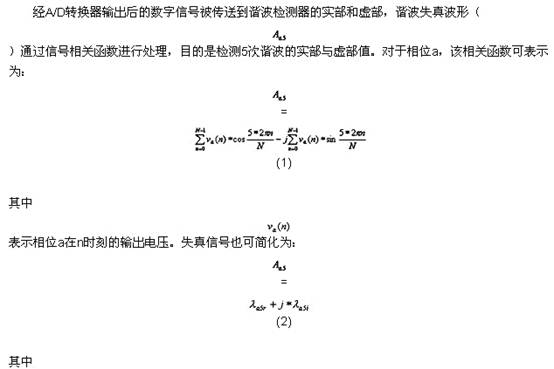
上面所提到的谐波失真校正信号是在负反馈回路中产生的。DSP在输出电压波形中检测谐波失真信号,并确定谐波元件实部和虚部的幅值。此过程是用来消除5次谐波的,但是如果谐波频率低于采样频率的一半时,该谐波也会以同样的过程被消除。
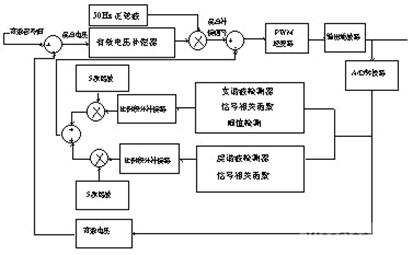
图2 DSP控制的UPS系统方框图

然后在比例积分补偿器中应用振幅元件来产生谐波失真校正信号,它基本上消除了输出波形的谐波失真。再从误差补偿信号中减去合成的谐波失真校正信号,将其结果输入PWM逆变器,从而产生一个基本上没有谐波失真的输出电压波形。DSP控制的逆变器和谐波调节器能够在变化的非线性负载条件下工作以提供正弦负载电压。
上一页 [1] [2] [3]





