・上一文章:基于MSP430的无线传感器节点动态功率管理研究
・下一文章:三相BLDC和PMSM设计的低压马达控制方案
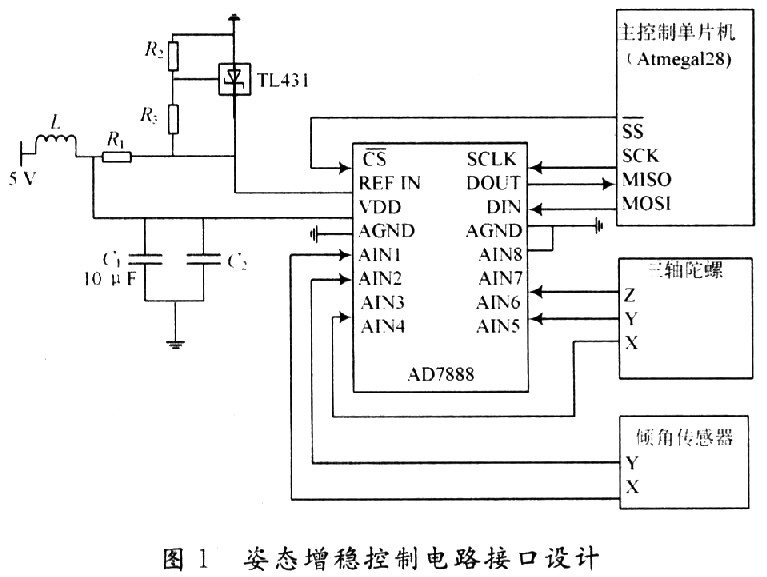
图l中,AD7888是一款高速率、低功耗的12位模拟数字转换器,能达到125 KSPS的传输速率,拥有8路模拟输入通道。![]() 为片选引脚,该引脚有两个作用,即启动AD7888转换器和制定串行数据的转移,与单片机引脚PB0(
为片选引脚,该引脚有两个作用,即启动AD7888转换器和制定串行数据的转移,与单片机引脚PB0(![]() )相连。SCLK为串行时钟输入引脚,通过外接单片机ATmegal28引脚PBl(SCK)提供串行时钟信号。DIN为逻辑数据输入端,DOUT为逻辑数据输出端,分别与ATmegal28的引脚PB2(MOSI)和PB3(MISO)相连。
)相连。SCLK为串行时钟输入引脚,通过外接单片机ATmegal28引脚PBl(SCK)提供串行时钟信号。DIN为逻辑数据输入端,DOUT为逻辑数据输出端,分别与ATmegal28的引脚PB2(MOSI)和PB3(MISO)相连。
外部基准电压的范围是Vref~VDD(Vref=1.2 V)。为了获得稳定的基准电压,采用由TL431组成基准电压电路。德州仪器公司(TI)生产的TL431是一个有良好热稳定性能的三端可调分流基准源。它的输出电压用电阻R2和R3就可以设置到从Vref=2.5 V到Vref=36 V范围内的任何值。
单片机ATmegal28与AD7888通过串行通信接口SPI相连,分别配置为主机和从机。SPI总线允许ATmegal28与外设之间进行高速的同步数据传输。
三轴陀螺主要用来测量无人机在飞行过程中俯仰角、横滚角和偏航角的角速度,并根据角速度积分计算角度的改变。该系统中采用日本松下公司的EWTS82(以下简称S82),其原理是将旋转时音叉震荡产生的地球偏转力(克里奥利力)转换为电信号。该三轴陀螺由传感器件、音叉驱动电路和信号处理电路构成。此款陀螺为一模拟器件,具有+80~-80(°)/s的测量范围,单电源(+5 V DC)供电,对零点漂移抑制较好等优点。另外,其低廉的价格可大大降低开发成本。
倾角传感器采用芬兰VTI Technologies公司生产的高精度双轴倾角传感器SCAl00T,该传感器的体积小,重量轻。其内部包含了一个硅敏感电容传感器和一个ASIC专用集成电路,既具有内部温度测量及补偿功能,又具备自检测功能,单轴最大输出范围约为-40~+40 ℃,有效输出范围为-30~+30 ℃。当采样频率为8 Hz及以下时,可获得0.002°的输出分辨率。串行外围接口SPI的输出频率为500 kHz,通过传感器元件控制频率响应,能够承受大于20 000g的机械振动。它具有的主要特点是:x,y双轴高分辨率双向测量,单电源(+5 V DC)供电,工作电流小(3 mA),噪声低,工作温度范围宽(-40~+125 ℃)等。





