・上一文章:交流伺服电动机中的滤波器
・下一文章:网络式温湿度监控系统研究
本论文结合上述情况,在某项目中总结出了一套对PID算法的参数进行整定的方法。PID调节方法是三阶系统中一种常用的有效控制方法。PID在许多系统中能够得到广泛的运用是由于这些系统都存在非线性和未知的干扰,尤其是在模拟和数字的混合系统中,由于模拟信号很容易受到影响,导致系统设计较为复杂。在一些相互合作的项目中,由于存在单位之间需要保密的原因,对系统的理论分析通常不能够做到具有精确的数学模型,因此,PID算法是解决这类情况的一种有效控制方法。
1 传统数字PID算法
1.1 位置式控制算法
位置式PID控制算法描述为:

令![]() 则离散化的PID位置式控制算法的编程表达式为:
则离散化的PID位置式控制算法的编程表达式为:

式中:k――采样序号;
u(k)――第k次采样时刻的计算结果;
e(k)――第是次采样相对目标位置的偏差值;
Kl――积分系数;
KD――微分系数;
KP―― 比例系数;
TI――积分时间常数;
TD――微分时间常数;
T――采样周期。
由式(2)可以看出,每次输出与过去的状态有关,要想计算u(k),不仅涉及到e(k-1),且须将历次相加。故用式(2)计算复杂,浪费内存。控制从手动切换到自动时,必须先将计算机的输出值设置为原始阀门开度uD,才能保证无冲击切换。
1.2 增量式控制算法
增量式PID控制算法描述为:
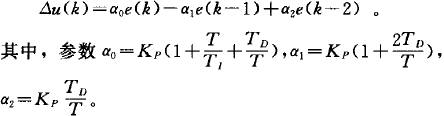
增量式只需计算增量,当存在计算误差或精度不足时,对控制量计算的影响较小。由于算式中不出现uO,易于实现手动到自动的无冲击切换。此外,在计算机发生故障时,由于执行装置本身有寄存作用,故可仍然保持在原位。
基于以上两种常规的算法,我们在实际应用中又提出了多种改良的算法。在本项目中采用了积分分离PID控制算法。
2 积分分离PID算法
积分分离控制算法的数学模型如下:
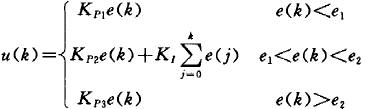
其中,e1、e2分别表示左、右的区间,即离目标位置的距离,这是常规积分分离PID控制算法。在实际的应用中可以根据不同的系统和实际情况再度进行分段。3 位置伺服系统中的算法





