�����ŷ��綯����Ӧ���Ѻ��ձ顣�����ȴӿ�������ʼ�������ٵ�������������Ҳ�����Ƶĵ綯���������г��ϡ����ż������ƣ��۸ͣ��������ܵ���ߣ����������������Լ�ϵ�л���ģ�黯���Ϸ�չ������ȡ���������͵��ŷ����Ƶ綯���ѳ�һ�����ơ�
ֱ�������綯��(d-d motor��dynaserv)���䲻��Ҫ����������ijЩ�ض����ϵõ��㷺��Ӧ�ã��൱�����dz��������ص綯����ֻ����ǰ���������͵Ľ����綯��ԭ���������ֿ���ʽ�ġ����ú�ӹ�˾(yokogawa)������������drvg��Ϊ�����������˲�������������Ϊ�����͵��ͺţ����Խ�ȫ��ĸ��������ͺŵ��÷���
������
���ȶ�������Ҫ�����м��֣�
1)������
��Ƶ��Ƶ�ʼ����ȣ����ȼ��ȵ���ʮ�ȣ���ʱ��������������λ�ÿ���Ƶ�ʴ������ٶȿ���Ƶ�ʴ���ʧ���������ٶȿ���Ƶ�ʴ���С��λ�ÿ���Ƶ�ʴ���3����Ҳ�������Զ�����ʱ��������ֵ�����ʣ������1.5��ʱ�����Է���ִ���Զ�����������������ֵ�������ܴ���20%����#0��������ֵ(�ŷ��ն����ò���)��
2������
�����������ڵ�������ִ�е�������ָ��ʱ������һ��һͣ���Ǿ�Ħ�������ڵ���ʱ�Ķ�Ħ�������¡�ԭ����λ�û�������ֵ̫��λ��ƫ��̫��Ӷ�ʹ����ϵͳ���ȶ��������ǵ�������������ֵ��������ϵͳ�նȡ�
3��������
��Ƶ��Ϊ��ʮ��200hz�����Ȳ����ڼ�ʮ�ȡ�ԭ�����ٶ�����ź���λ������ٶ������ź���λ180�㣬�ɿ������ۿ�֪��ʱϵͳ���ȶ�ԣ�����������˲���ʹ����ͬ��Ƶ�ʻ��ٶȿ��ƴ������˲���Ƶ�ʴ�����ͬʱ����������������������Ϊ����#1��������ֵ(�ŷ��ն����ò���)��
4���
��Ƶ��Ϊ��ʮ��2khz�����ȶ��༸�ȣ����ṹ���������С��Ƶ�ʸߣ������������������ϵͳ�ն�С�����������������ԭ���Ǹ��صĻ�ег���Ŷ������ٶȿ��ƻ�������������м���г��Ƶ�ʡ��������ϵͳʱ��ег��Ƶ��Ӧ�����ߣ�����Ҫ����ϵͳ���ƴ���5�����ϣ��ṹ���ʱע�������ƣ�����ϸ���˽ṹ���ɵ����˲�������Ƶ��г��������������
�˲���
Ϊ�������������˲��������ݾ������ѡ�á�
a.��λ�ͺ��˲���
Ϊһ���ӳ��˲������������ɵ��ڴ�����Ƶ�ʣ��������ᣬ�ڼ��������������ٶȷ����˲�����
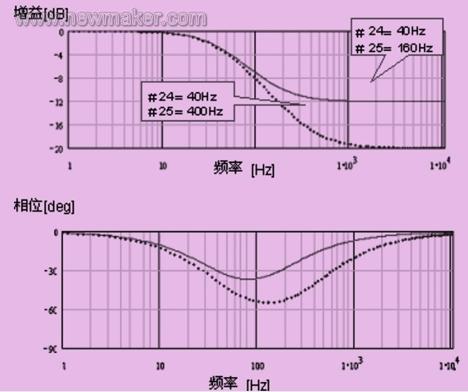
ͼ1 ��λ�ͺ��˲���bodeͼ
��ͼ1��bodeͼ�ɿ��������ٶȷ����˲�����һ��һ���ֻ������ڲ�����λ��ʧ������#24��Ӧ���ֳ���������#25��Ӧ�ֳ����������������˥����Ƶ�ʿ����ã�ʹ��λ�ͺ������С�����⣬������ݲ��˲�������������Ƶ�ʷ�Χ����г��Ч���ã������������ֵС���Է�ֵ��Ƶ��խ��г���ʡ�
ע������ٶȿ��ƴ�����һ�ײ����˲�����Ƶ������̫�ӽ�����������
b.�ݲ��˲���
�ݲ��˲����ֳ�Ϊ�����˲������ɶ�����Ƶ���ź���Ч����ϣ�������ʹг�������潵���㡣��г���ֵ�߶�Ƶ�ʴ���խʱ���á�ͨ���ı�Ʒ������(qֵ)ʹ˥�����Ա仯�����ƽ����Ƶ�����÷�Χ��50~1500hz��qֵ���÷�Χ��0.5~2.5(Ĭ��ֵ1.5)��ͼ2ʾ�����ݲ��˲�������ͼ��
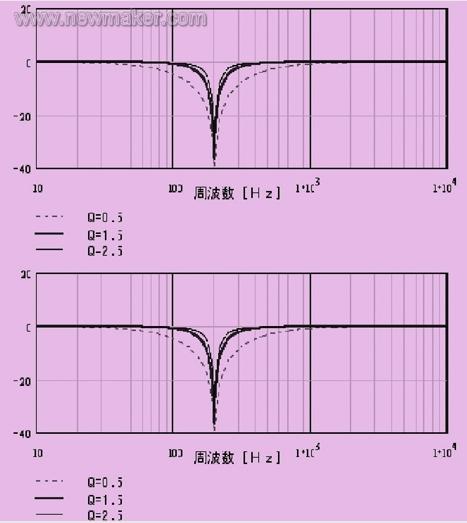
ͼ2 �ݲ��˲�������ͼ
��г��Ƶ��̫��ʱ���˲��������˳��ɾ���
[1] [2] ��һҳ





