・上一文章:农村配网智能化建设探究
・下一文章:SF6高压断路器内部故障分析研究
摘要:本文介绍UNITROL6800励磁系统动态均流原理,分析动态均流实际应用过程中存在的问题,并对动态均流技术的使用提出建议。
励磁系统作为重要的发电机控制装置,对发电机安全稳定运行起着决定性的作用。目前,大型发电机励磁系统都采用多个整流桥并联运行方式,但是可控硅特性、电气回路特性和环境温度等的差异,导致并联运行整流桥的电流不均衡。GB/T 7409. 3-2007《大、中型同步发电机励磁系统技术要求》规定大功率整流装置均流系数不低于0.85。为使整流桥均流系数达到规定值,主要采用自然均流法和动态均流法。自然均流对整流回路电气特性一致性要求很高,导致整流回路硬件安装及更换时的调整试验工作量很大,且随着设备长期运行,整流回路硬件特性发生变化可能使均流效果变差。动态均流则不需要特别关注整流回路电气特性差异,通过调整可控硅触发角度即可实现更好的均流效果,对整流回路电气特性差异适应性很好。本文将以UNITROL6800励磁系统动态均流技术应用为例,介绍动态均流功能的实现,并对检修维护中存在的问题进行分析与处理。
1 UNITROL6800励磁系统动态均流原理
实现动态均流需要计算出各整流桥或可控硅的平均电流值作为均流的目标给定值,由目标给定值和各整流桥或可控硅的实际值计算出偏差值。均流控制器根据偏差值输出均流角,再由可控硅触发单元将均流角叠加到整流触发角上得到最终的触发角进行可控硅均流控制。UNI-TROL6800励磁系统动态均流原理如图1所示。动态均流主要分为平均值计算和均流控制两部分:
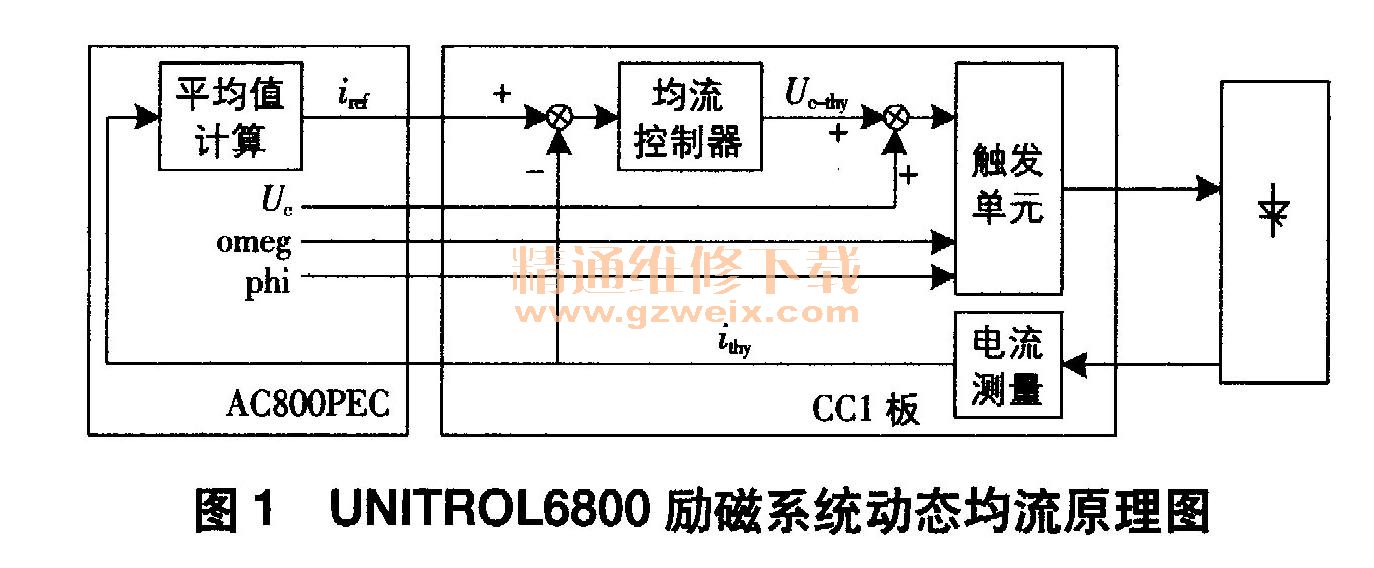
(1)可控硅电流信号由整流桥交流侧3只变送器检测后,送入整流桥控制板CCI中进行计算,计算出的整流桥电流值由CCI送人调节器AC80OPEC计算平均值;
(2)调节器计算出的平均值反馈给整流桥控制板CCI与实际值比较得到偏差值,均流控制器根据偏差值计算出均流控制量Uc-thy,并叠加到可控硅控制信号Uc上,调整可控硅触发角度以实现均流。
1.1整流桥给定值计算
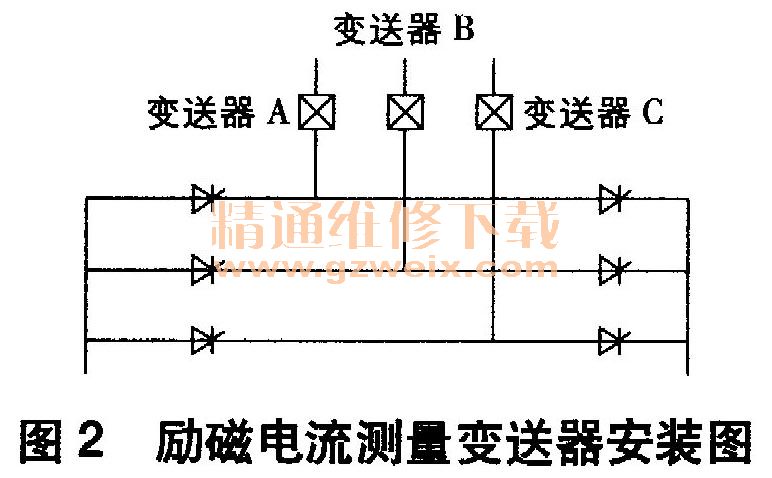
UNITROL680。励磁系统动态均流模式分为桥间均流和臂间均流,桥间均流以整流桥总电流作为均流目标,而臂间均流以并联运行的整流桥同支臂可控硅电流作为均流目标。动态均流目标给定值(平均值)分为整流桥平均电流值和整流桥6个支臂可控硅(R+、R-、S+、S-、T+,T-)平均电流值。图2中整流桥电流为:

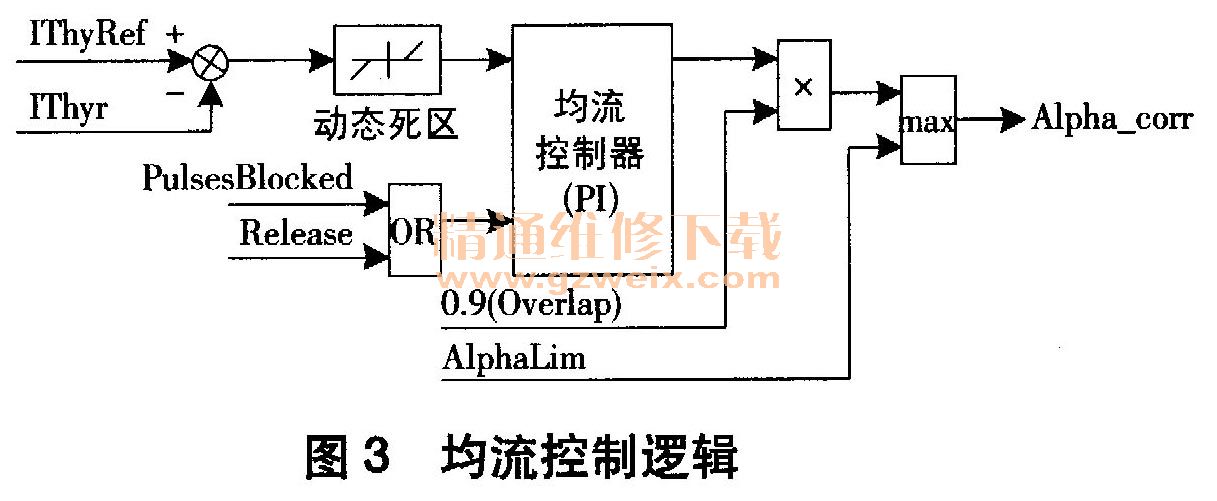
1.2均流控制原理
均流控制逻辑如图3所示,均流目标给定值与实际值的偏差值经过动态死区送人均流控制器,只有当偏差值大于死区值时,励磁系统才进行动态均流调节。均流功能的关键部分为一个PI型均流控制器,其积分时间常数界不能设置太小,应与均流过程相适应,以避免影响励磁电流闭环控制(励磁电流闭环控制优先)。同时,均流控制器具有单向死区,只有负的偏差值才能使其输出均流角,即动态均流功能只能使触发角增大(可控硅电流减小)而不能使触发角减小(可控硅电流增大),这样可防止均流功能导致整流桥间电流相互竞争。均流角最终输出前,需通过限制器进行角度限制,以防止均流功能异常导致事故。