・上一文章:汽车用永磁无刷直流电机设计
・下一文章:汽车应用中磁阻传感器系统的建模和仿真
引言
随着电子技术的发展,汽车电子化程度不断提高。安全、便捷、舒适、无污染、经济性一直是汽车工业和用户追求的目标。实现这些目标的关键在于汽车的电子化和智能化,先决条件则是各种信息的及时获取。
汽车在行驶过程中的各种路况信息是非常复杂的。在行驶过程中可作为刚性特征体来考虑,将三轴加速度计放在被测车体的某个特征点上,就可准确地采集到该特征点运动过程中在x轴,y轴,z轴的三个加速度分量。结合车体总质量可以计算出车辆的瞬时受力情况;结合车辆即时速度,可以计算出瞬时功率。采集和计算出的运动参数等信息可以进行本地的控制处理。同时,本系统支持CAN总线接口,利用该接口,可以将得到的数据发送到汽车计算机控制系统进行综合分析处理。从而使本系统可以广泛应用于汽车自动变速器,汽车安全气囊(Airbag)、ABS防抱死刹车系统、电子稳定程序(ESP)、电控悬挂系统等方面。
1 方案总体设计
该采集平台需要解决数据采集、计算及通信的问题,而且由于应用环境的复杂性,需要保证系统的抗干扰性及可靠性。系统硬件结构框图如图1所示。主控制器通过ADXL330采集三个坐标轴上的加速度分量,经过分析计算后提供给本系统直接应用或通过CAN总线提供给别的应用者。

2 建立汽车运动模型
汽车在路面上的运行环境是非常复杂的,受到的振动频率分布很宽,一般情况下车辆的振动频率范围可分为如下几种情况:
刚体运动:0~15 Hz;
结构振动,板件共振:15~150 Hz;
噪声及啸鸣:150 Hz以上。
汽车典型的共振频率范围通常为:
车身共振频率:1~1.5 Hz;
车轮跳动:10~12 Hz;
座椅上的乘客:4~6 Hz;
悬置的动力总成:10~20 Hz;
结构共振频率:大于20 Hz;
轮胎共振频率:30~50 Hz和80~100 Hz。
在研究车辆的运动时,主要研究的对象一般包括车辆的运动速度、运动位移、瞬时加速度、瞬时功率、瞬时驱动力等。而以上各项参数,均可通过对被测点的加速度计算得出。车体在空间位置的加速度如图2所示。

车辆瞬时驱动力F=ma。其中,F为车辆的瞬时驱动力;m为车体总质量;a为运动加速度。
速度![]() 。其中,v为运动速度;v0为初始速度;
。其中,v为运动速度;v0为初始速度;![]() 为加速度对时间的积分。
为加速度对时间的积分。
瞬时功率P=Fv。
ADXL330是一个三轴(x轴,y轴和z轴)模拟输出的加速度传感器,通过ADXL330能够测量出任意时刻三个方向的加速度分量。通过测量得到的加速度分量可以计算出车辆的运行状态,动力学参数等信息。
3 硬件设计
3.1 电源设计
汽车的用电设备所需电能有两个来源:发电机和蓄电池,输出的额定电压为12 V。本设计中采用LM2575开关稳压器和LM1117低压差线性稳压器将12 V输入电压转换为5 V和3.3 V的供电电源。电源设计原理图如图3所示。
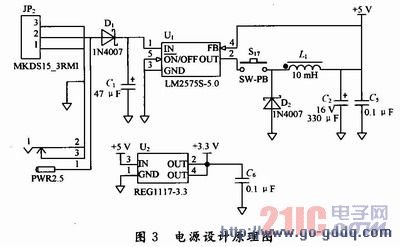
LM2575是美国国家半导体公司生产的1 A集成稳压电路,电压输入范围宽为7~40 V,电流输出最大可达1 A;同时内部有完善的保护电路,包括电流限制及热关断电路等。
LM1117为低压差线性稳压器,其压差典型值仅为1.2 V,输出电压精度高达±1%。输出的3.3 V电源提供给主控制器使用,为保证电源系统的稳定性,输出端需要添加一个10μF的钽电容来改善瞬态响应和稳定性。





