・上一文章:STM32直接驱动RGB接口的TFT数字彩屏设计
・下一文章:基于MiniGUI的数字加密电话系统GUI设计
摘要:使用ADXL345三轴加速度传感器、nRF24L01无线收发芯片及USB接口芯片CY7C68013与上位机构建了一个人体动作信息测量设备。该设备由5组相同的动作测量模块、1组数据接收模块构成。动作测量模块置于人体四肢及躯干测量人体动作信息,数据接收模块通过无线方式收集加速度数据,并通过USB芯片上传给PC机,PC机计算出各部位的角度信息后绘制人体实时动作模型。通过与实际人体动作比较,该设备可以较好地反应人体动作情况,可以应用于多种人机交互场合。
关键词:ADXL345加速度传感器;人体动作信息;nRF24L01;CY7C68013
引言
长久以来,使用人体自然动作与计算机交互一直是人机交互技术追求的目标之一。目前主流的人机动作交互技术有2种:视频动作识别技术和惯性器件动作识别技术。
前者以MICroSOFt Xbox 360的Kinect视频感应器为代表,依靠摄像头采集人体动作视频,通过识别算法进行分析,可较准确地识别人体动作,但需要强大的硬件处理能力、复杂的软件识别算法,而且对于多人、高复杂度动作难以识别。后者的代表为任天堂的Wii mote手柄,主要依靠惯性器件反映出肢体的速度、位移及倾斜度。该技术算法简单,识别精度较高,但需要佩戴传感器模块,可能给体验者带来不适。识别动作的复杂度与传感器的数量、精度有关,如Wii mote局限在于仅能感知手部运动,随着传感器使用数量、种类的增加,精度的提高,人体各种快速、复杂的运动都可被精确识别,这是视频识别技术所难以达到的。
本文介绍的设备是使用加速度传感器的无线人体动作信息测量设备,在人体四肢及躯干同时佩戴5组测量设备,准确反映人体各部分动作情况,同时使用无线数据传输方式减少体验者的不适感。
1 测量原理
测量模块放置于人体四肢及躯干,以右手为例。测量模块放置于右手肘关节外侧,根据重力在加速度传感器三轴上的分量,可以计算出传感器坐标系与自然坐标系的夹角,进而得出传感器所在手臂平面与自然坐标系的夹角,根据三个夹角与传感器到肩膀的固定位置,可以计算出传感器所在手臂部位的空间位置。传感器坐标系与自然坐标系夹角如图1所示。
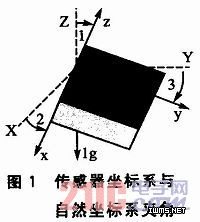
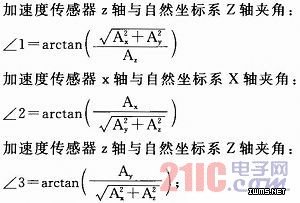
式中Ax为传感器x轴加速度分量,Ay为传感器y轴加速度分量,Az为传感器z轴加速度分量。人体躯干直立,右手微抬时传感器所在手臂与自然坐标系的三个夹角如图2所示。其中右手上白点代表传感器。





