・上一文章:高压看门狗定时器如何提高车载系统安全性
・下一文章:基于LM3431的LED背光系统解决方案
综上所述,汽车电子稳定系统ESP在汽车出现不稳定行驶趋势时,采用了两种不同的控制方法,使汽车消除不稳定行驶因素,回复并保持汽车预定的行驶状态。这两种控制方法是,首先ESP系统通过精确地控制一个或者多个车轮的制动过程(脉冲制动),根据需要分配施加在每个车轮上的制动力,迫使汽车产生一个绕其质心转动的旋转力矩,同时代替驾驶员调整汽车行驶方向。其次在必要时(比如车速太快,发动机驱动转矩过大),ESP系统自动调整发动机的输出转矩,控制汽车的行驶速度。
通过采取上述两种技术措施,当汽车进行蛇形线路测试的时候就可以有效避免汽车的翻转。ESP系统不仅仅是在干燥路面上提高了汽车的稳定性,还可以在路面附着性比较差的时候,诸如结冰、湿滑,以及碎石等情况下起作用。在上述不利状况下,车轮与路面之问的附着力降低,即使是最好的驾驶员也很难将高速行驶的汽车保持在预定的路线上,汽车容易发生侧滑和跑偏,失去方向稳定性,甚至在急转弯的时候发生翻车事故,这时就需要ESP系统。
3.汽车电子稳定系统的可靠性
梅塞德斯-奔驰公司从1994年起就对ESP系统进行了适用性和可靠性的全面验证试验。
在微机控制系统的ROM中,预先储存的控制程序中的标准技术数据,应该来源于大量的实车测试数据。但由于在没有安全保障的情况下的实车试验,有可能造成无法弥补的安全事故后果,因此标准技术数据的取得,采用了模拟器。模拟器内输入了大量的通过实验采集的数据,可以仿真出很多复杂的路面状况和驾驶过程。再通过80位梅塞德斯轿车车主用模拟器进行时速为100km/h的模拟路面驾驶试验,得到各种不同性能的汽车在各种驾驶过程中的响应。模拟器检测手段既安全,又可以得到很多实车试验无法测量的数据。比如,在试验场的4个转弯处,用模拟器模拟路面突然结冰的情况,这将使车轮和路面之间的附着力在几米的路程内减少 70%以上。如果轿车没有ESP系统,则78%的驾驶员不能将他们的汽车稳定在冰雪路面上,还可能遭受汽车连续3次翻转造成的伤害。有了ESP系统,所有参加过模拟测试的驾驶员都能避免汽车翻转事故的发生。
1995年,梅塞德斯-奔驰S级轿车开始安装ESP系统,ESP系统突出的安全保障表现,大大降低了汽车在各种道路状况下以及转弯时发生翻转的可能性。同时汽车在弯道和湿滑路面上的制动距离得到缩短,在弯道行驶加强了汽车线内行驶能力。1998年,梅塞德斯-奔驰A级微型轿车也安装了。ESP系统,使这种采用大量高新技术开发的A级微型轿车,克服了因车身较窄,在汽车以小转弯半径急转向时,容易产生侧向翻转而造成人身伤害和财产损失的缺点,成为一辆安全性能卓越的微型轿车。
目前,梅塞德斯-奔驰公司的S600、CL600、sL600、FA30、E320、4MATIC以及高性能的E55AMG和C43AMG等车型上都选配了ESP系统,2002年所有G级车上都安装了该系统。
4.新一代汽车电子稳定系统
新一代汽车电子稳定系统将主动转向控制系统(Active steering Control,ASC)和可选择悬架模式的主动悬架控制系统(Active DamPINg Control,ADC)和ESP集成在一起,使汽车的动态稳定控制技术更加完善,提高了汽车在任何情况下的行驶稳定性和操纵稳定性。
在非危险行驶状况下,主动转向控制系统使驾驶更灵活,以增加驾驶乐趣。在危险行驶状况下,主动转向控制系统与制动系统、发动机管理系统共同控制汽车的行驶稳定性和乘坐舒适性。
5.综合稳定控制系统
综合稳定控制系统在任何给定的条件下,具有综合控制车上所有的主动系统,如驱动、制动和操纵系统等功能。综合稳定 控制系统与现行的主动车辆稳定控制系统相比,可以对汽车进行持续控制,并实现控制的个性化。
6.汽车底盘电子控制系统的发展
(1) 集成底盘管理系统
随着电子技术特别是大规模集成电路和微型电子计算机技术的高速发展,汽车的电子化程度越来越高。汽车的底盘系统也改变了以往那种完全依靠液压或气压执行机构来传递力的机械式结构,开始步入电子伺服控制(By-wire,操纵装置与执行器之间靠电信号联系而非机械的连接)阶段,底盘综合控制系统也已开始出现。先进的底盘电子控制系统优化了车轮与地面之间的附着状况,显著地改善了汽车的动力性、安全性和舒适性。
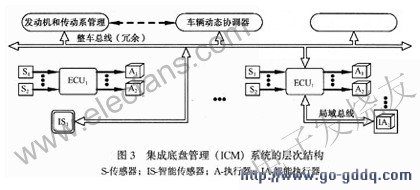
汽车底盘电子控制系统将逐步形成一个集成底盘管理(ICM)系统。该系统将集成所有的底盘电控子系统,实现各子系统问硬件、能量和信息的共享,以最大限度地获取系统集成带来的增效作用,提高汽车的安全性、舒适性和经济性。图3是ICM系统的层次结构,结构图的上层只包含了一些关键的监控功能,在这一层次上系统通过一个“协调器”ECU来实现对发动机、传动系、底盘系统等的管理。空白方块代表其他的功能,如导航和ACC功能。结构图的下层代表目前的电控系统,不过它 们不再是单独工作的模块,而是在上层单元监控、管理下协调工作。系统中的传感器和执行器可分为两类:传统型和智能型。传统型传感器和执行器与各自的ECU之间只有直接的物理连接,而智能传感器和执行器与ECU之间则使用总线接口来传输数据。一般情况下它们都具有自诊断能力和一定的传感器信号处理能力。
(2) 动力车身控制系统(Dynamic Body Control)
对于多用途运动车(SUV)和其他质心较高的汽车,动力车身控制系统可最大程度地提高转向稳定能力,同时汽车行驶舒适感增强。在汽车越野行驶时,车桥通过相互配合来获得更好的牵引性能。动力车身控制系统使用1~2个主动式平衡杆模块,通过对平衡杆施加可调节的预加载荷来防止汽车转弯时发生左右摇晃。当汽车车身要发生倾斜时,加速度计监测到汽车侧滑倾向,将信号传到控制系统ECU,ECU指令向平衡杆执行器通入压力油,压力油产生力的大小根据加速度计监测到的汽车横向加速度大小和汽车产生摇晃的时间来确定。





