・上一文章:FPGA基于非易失性技术的低功耗汽车设计
・下一文章:华北工控MINI PC电脑在汽车信息系统中的应用
摘 要: 计算机网络控制系统可以有效地利用异地的物质和智力资源,建立网上共享资源库,实现计算机集成制造系统。本文利用了现场总线先进的控制技术,选用了CAN总线作为底层的分布式控制技术,设计开发了基于CAN总线的数控系统底层测控模块,使本地各设备的信息交互更加迅速。
1 引言
用计算机或微控制器通过一种或多种总线方式,实现与现场各种设备的通信,并通过总线实现对现场设备进行必要控制的计算机网络系统称为底层测控通信网络系统,简称底层测控网络。本文是针对数控系统方面来展开研究的,提出了一种基于CAN总线的数控系统底层测控网络, 现场设备就是数控机床等数控设备。
2 CAN总线的基本工作原理
CAN总线的拓扑结构是一个典型的串行总线的结构形式。CAN总线中一个节点发送信息,多个节点接收信息;但CAN总线的信息存取方式采用的是一种广播式的存取工作方式。在CAN总线的通信协议中支持的是基于报文的工作方式。也就是说加入或撤销节点设备都不会影响网络的工作,十分适用于控制系统要求快速、可靠、简明的特点。CAN总线的数据通信具有突出的可靠性、实时性和灵活性。CAN采用了CRC校验并可提供相应的错误处理功能,保证了数据通信的可靠性。为了清楚地说明数控系统远程测控仪的工作原理,我们以结构方框图的形式表示如图1所示。输入信号来自于数控机床电机编码器的光电编码器,输出信号可以去伺服驱动或控制其它需要的信号,下面是它的工作原理:
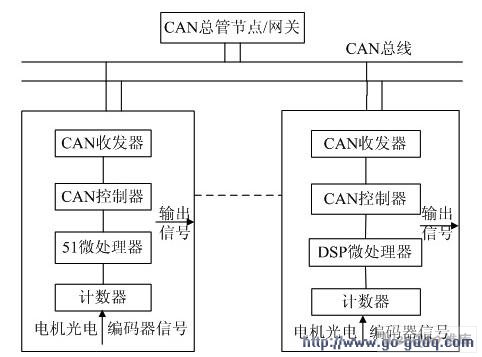
图1 基于CAN总线的数控系统远程测控仪的工作原理图
由伺服电机编码器的脉冲输出信号进入测控仪的输入端,后经计数器滤波、倍频、鉴相、计数等;微处理器对采来的数据进行一定较简单处理,再转发到CAN控制器的缓存器里面;时机成熟CAN控制器再进一步发给CAN收发器(驱动),最后CAN收发器把数据转发给CAN总线、总管CAN节点的收发器、CAN控制器;总管CAN节点充当网关的作用,把底层CAN节点的数据取出来以便自己或其它对其进行进一步的复杂分析处理,相反上面来的数据依照同样的道理可以通过CAN网关下传到底层的CAN节点。就这样底层和中间层进行了数据信息的交流。底层的CAN节点也可以接受CAN总管节点发来的信息,通过输出信号通道把命令传给相应的接口电路、伺服系统,以便对数控设备进行控制。





